
In diesem Beitrag zu meiner Nighthawk 250 FPV Racer Reihe geht es um die Konfiguration des Flightcontrollers CC3D (CopterControl3D). Vorab sei gesagt, dass die von mir gezeigten Bilder die Einstellungen meiner Basiskonfiguration zeigen. Diese sind auf exakt mein Koptersetup angepasst und stellen eine mögliche Konfiguration dar. Werte sollte nicht einfach auf ein anderes Setup übertragen werden. Es immer erforderlich sein eigenes, auf die Hardware abgestimtes Setup (Motoren, ESC´s etc.), einzustellen. Keine Sorge, das ist nicht sonderlich schwer, denn die OpenPilot Software (GCS Ground Control Station) bietet einen Wizard für das Anlernen der ESC´s und für die Konfiguration des Sender an.
Die OpenPilot Software „Ground Control Station“ gibt es für Linux, Mac und Windows direkt auf der Projektseite https://www.openpilot.org/
Ein ausfühliche Dokumentation der Installation und Konfiguration des OpenPilot Flightcontrollers gibt es im englischsprachigem OpenPilot Wiki. Das Wiki ist sehr zu empfehlen.
Schritt 1 – OpenPilot Software (GCS Ground Control Station) installieren
Schritt 2 – CC3D Firmware Update
Schritt 3 – (Halb-) Automatische Konfiguration der Hardware
Schritt 4 – Sender Konfiguration
Schritt 5 – Einstellungen anschauen und anpassen
Schritt 1 – OpenPilot Software (GCS Ground Control Station) installieren
Die heruntergeladene Datei wird auf dem PC mit einem Doppelklick über einen Assistenten installiert. Deutsch als Sprache steht leider nicht zur Verfügung, daher bleibt dann in der Regel nur Englisch zur Auswahl. Die Standard Einstellungen des Installationsassisten können beibehalten werden. Während der Installation wurd auch ein virtueller COM Port eingerichtet. Nach Abschluss der Installation startet die Software OpenPilot GCS automatisch.
Schritt 2 – CC3D Firmware Update
Bevor es an das Anschließen des CC3D Flightcontrollers per Mini-USB an den PC geht, gilt:
KEINE PROPELLER – Propeller dürfen nicht am Motor montiert sein
Zu diesem Zeitpunkt darf auch der LiPo nicht am Nighthawk 250 angeschlossen sein. Die Stromversorgung für den Flightcontroller kommt über das Mini-USB Kabel.
Jetzt kann der CC3D Flightkontroller mit dem Mini-USB Kabel an den PC angeschlossen werden. Zunächst prüft OpenPilot GCS welche Firmware auf dem CC3D installiert ist. Wenn eine neuere Firmware-Version verfügbar ist, wird diese heruntergeladen und auf dem CC3D eingerichtet.
Schritt 3 – (Halb-) Automatische Konfiguration der Hardware
Nun geht die eigentliche Konfiguration. Zuerst wird nach dem Anschluss-Typ für den Empfänger gefragt. Es gibt PWM, PPM, S.Bus und DSM Sat zur Auswahl:

Meine Wahl ist die PWM, da ich am Spektrum AR610 Empfänger jeden Kanal über ein Kabel angeschlossen habe.
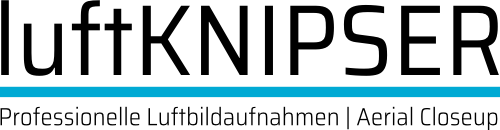
Jetzt geht es weiter zur Vehicle Type Selection. Hier wählt man Multirotor aus:

Weiter geht es mit der Auswahl des Multirotor-Typs. Der Nighthawk 250 ist ein Quadkopter, welcher in der X-Konfiguraion angesprochen werden kann. Die Auswahl ist daher auf „Quadcopter X“ einzustellen.
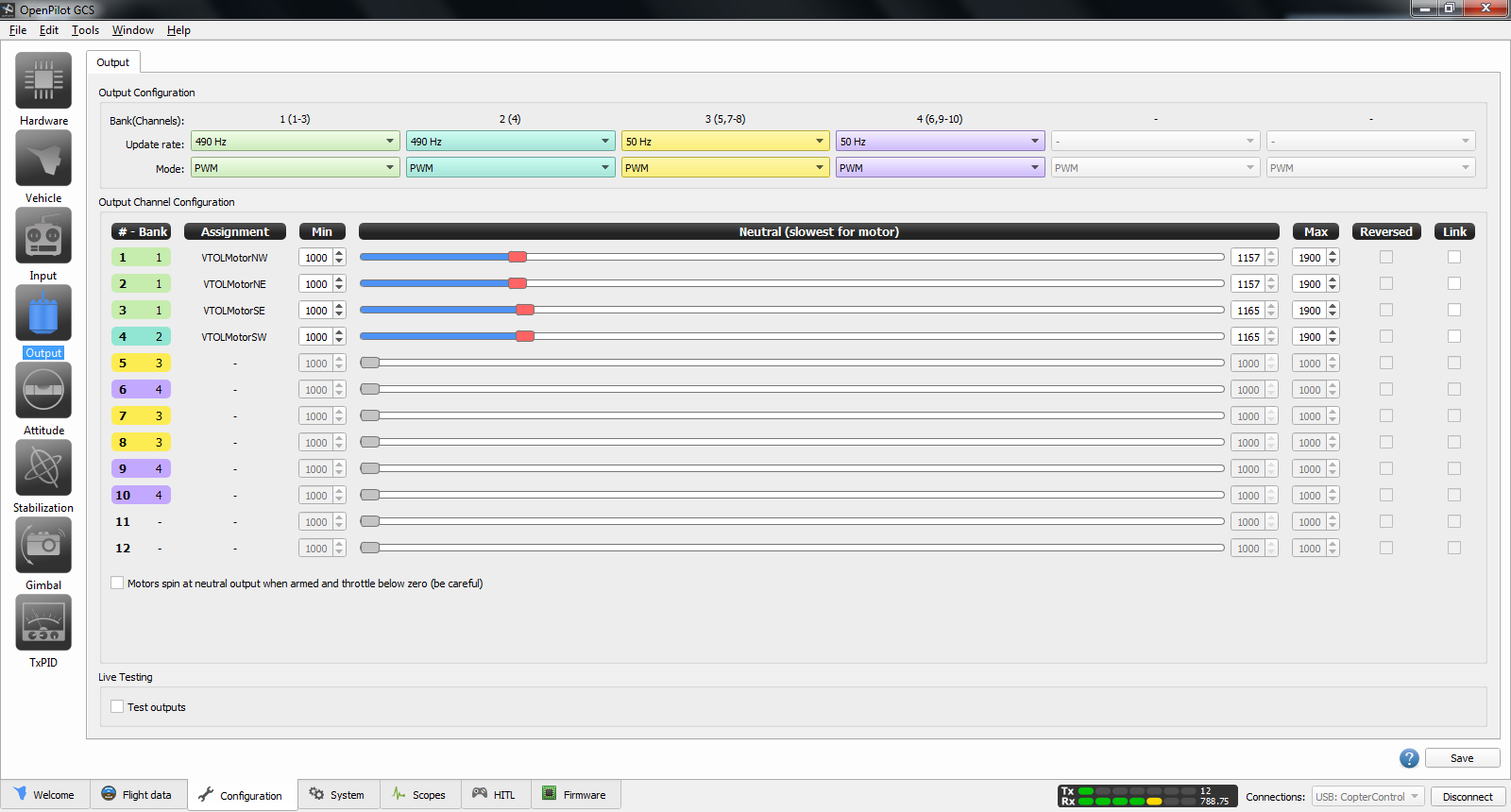
Im nächsten Fenster muss der ESC (Electronic Speed Controller) Typ ausgewählt werden. Bei dem AGM Nighthawk 250 Set sind 12A BLHeli ESCs dabei. Die richtige Auswahl ist RAPID ESC (490Hz Rate):

So, jetzt geht es ans Eingemachte. Daher noch mal der Hinweis, falls noch nicht vorgenommen: Propeller vom Kopter demontieren! Ebenso die losen Propeller Muttern entfernen.
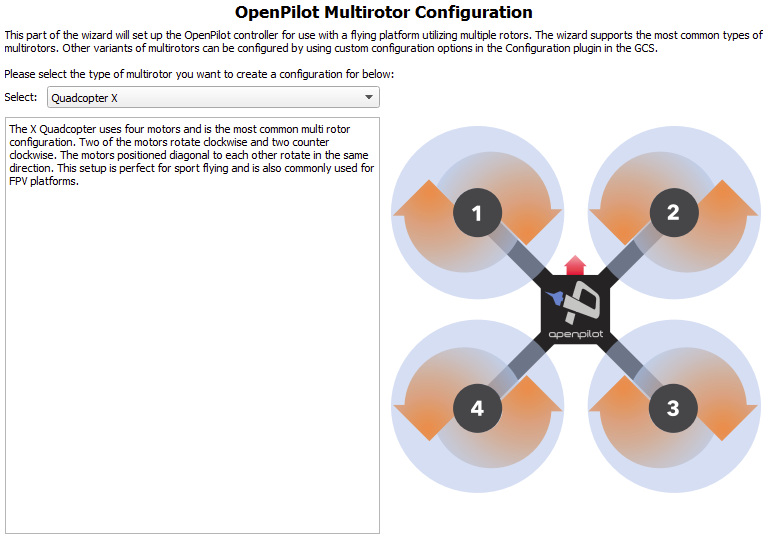
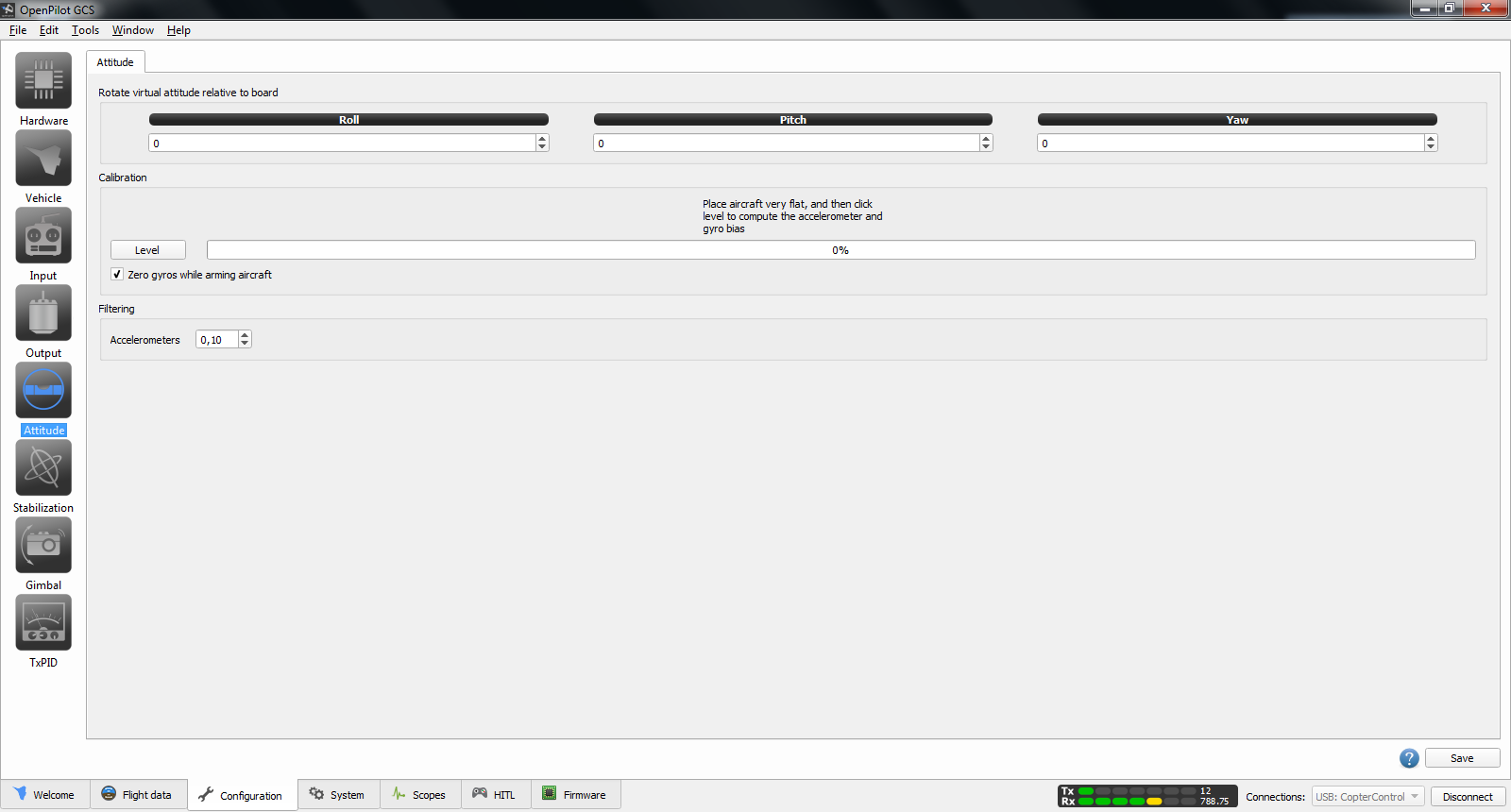
Der Nighthawk 250 FPV Racer ist nun auf eine ebene (waagerechte) Fläche zu stellen. Es geht an das Kalibrieren der Sensoren auf dem CC3D Board:
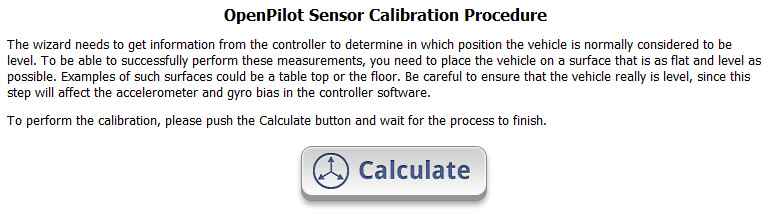
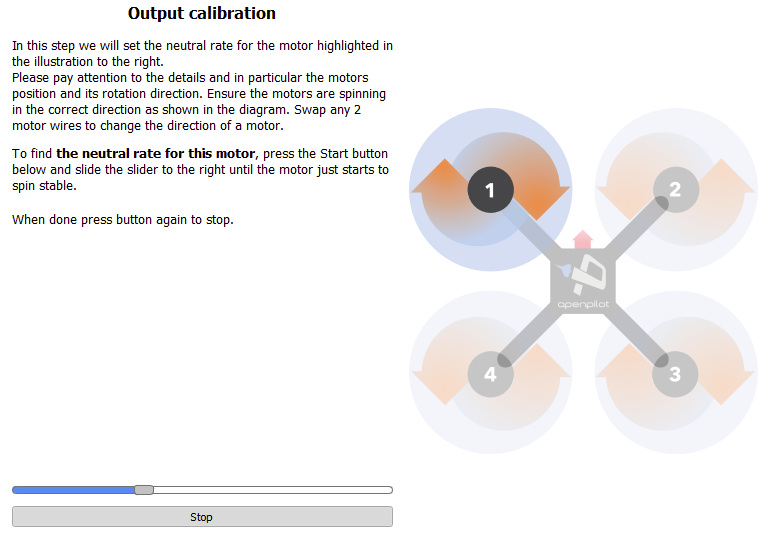
Nun folgt das sogenannte Anlernen der ESCs. Die ESCs werden einzeln nacheinander kalibriert. Hier ist den Anweisungen im Setup Wizard folge zu leisten. Grafisch wird angezeigt, zu welchem Zeitpunkt der LiPo an den Kopter anzuschließen ist:
Das Einregeln des Motors erledigt man über einen Schieberegler. Über die Schaltfläche „Start“ wird der in der Grafik angzeigte Motor angesprochen. Den Schieberegler schiebt man nach rechts und man hört und sieht den Motor laufen. Nun schriebt man den Regler wieder nach links bis an die Stelle, wo der Motor gerade noch läuft. Wenn man zu weit nach links regelt, geht der Motor aus. Ist aber kein Problem, dann einfach wieder etwas nach rechts regeln. Dies ist dann die „Leerlauf-Position“. Ist die richtig Position gefunden drückt man die „Stop“ Schaltfläche. Diese Prozedur ist mit jedem der vier ESCs / Motoren durchzuführen:
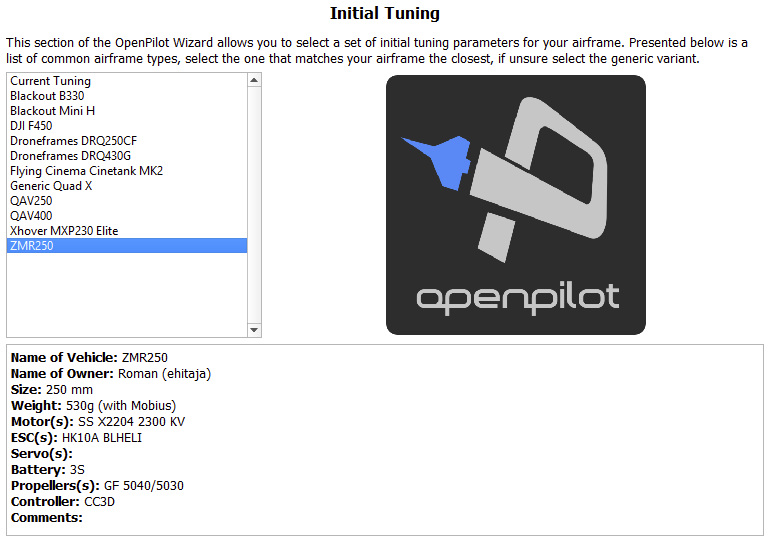
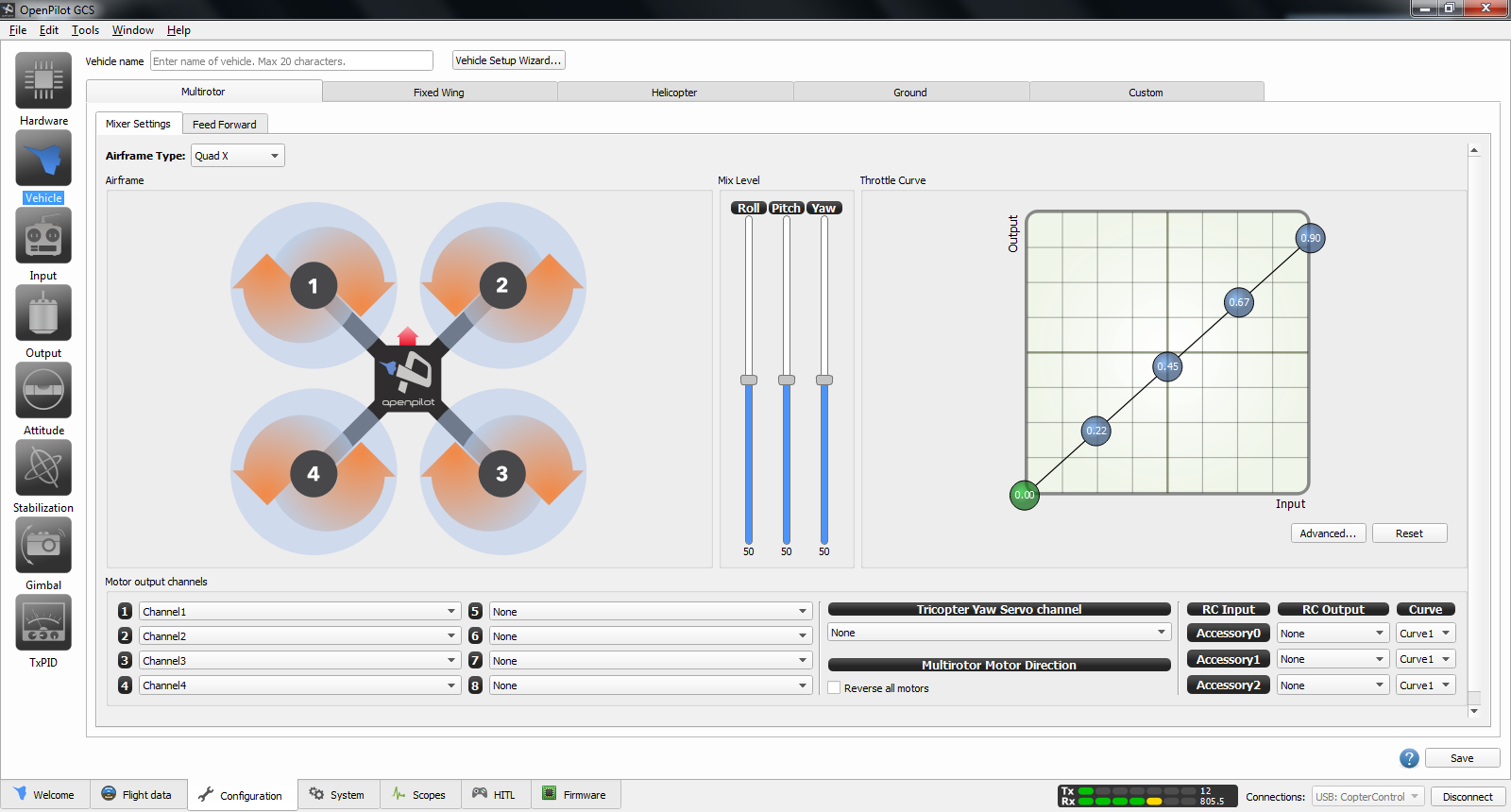
Abschließend folgt im Wizard ein Bildschirm mit der Auswahl von vorkonfigurierten gängigen Quadrokoptern. Damit man schon mal eine Vorkonfiguration hat, habe ich hier ZMR250 ausgewählt. Dieser komt dem Nighthawk Setup am nächsten. Das Verstehen und Anpassen der Einstellungen ist einfacher wenn schon Werte vorgegeben sind:
Damit ist der Konfigurations-Assistent für das Kopter-Setup abgeschlossen und die Konfiguration kann auf dem CC3D Controller gespeichert werden. Hierzu im Assistent auf die Schaltfläche „Save“ drücken. Geschafft.
Schritt 4 – Sender Konfiguration
Damit der AGM Nighthawk 250 auf die Steuerbefehle des Senders (bei mir eine Spektrum DX9) reagiert, wird in diesem Schritt der Sender konfiguriert und kalibriert. Der LiPo muss darf dafür am Kopter angeschlossen sein, da der USB Anschluss nur das CC3D mit Strom versorgt und nicht die weiteren Komponenten wie die ESCs, den Empfänger und so weiter.
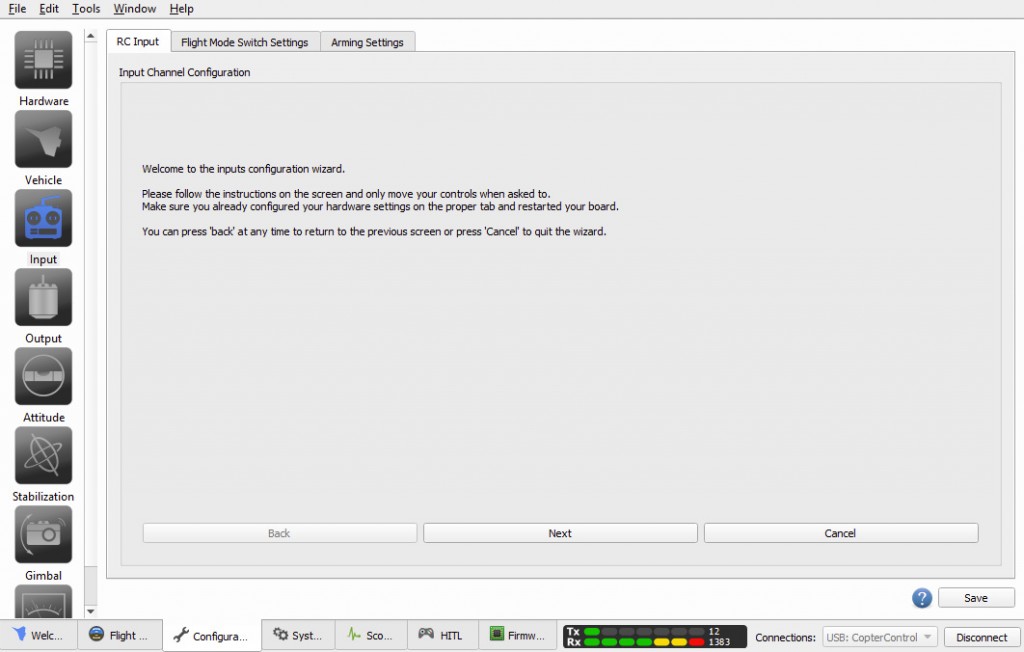
Zunächst ist am Sender ein neues Flugmodell anzulegen. Bei der Spektrum DX9 ist hierfür der Typ Acro zu wählen. Mehr ist nicht zu machen. Alle anderen Einstellungen können erst mal so bleiben wie sie sind. Sofern der Empfänger und der Sender noch nicht gebunden sind, kann man dies in diesem Schritt jetzt einfach, gemäß Herstellerbeschreibung durchführen. Ist das erledigt, geht es mit dem Transmitter Setup Wizard weiter:

Auch hier gilt es genau den Anweisungen des Assistenten zu folgen. Sollte was nicht klappen, kann man auch später die Senderkonfiguration erneut durchführen oder auch manuell einstellen. Am einfachsten geht es aber mit dem Assistenten:
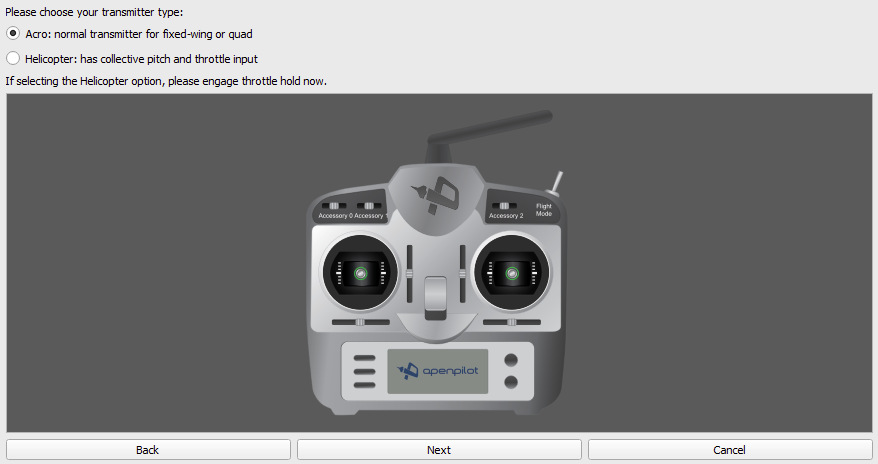
Im nächsten Fenster stellt man den Sender Typ (Transmitter type) ein. Hier ist „Acro“ zu wählen:
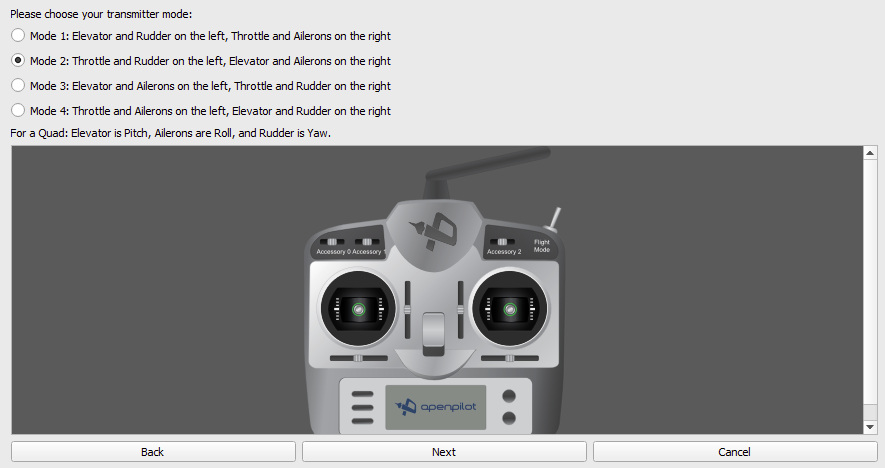
Jetzt wird der Sender Mode (Transmitter Mode) ausgewählt. Ich persönlich fliege Mode 2, was in der Regel der übliche Mode für Kopterpiloten ist. Mode 2 bedeutet das Gas (Throttle) und YAW auf dem linken Stick liegt. Auf dem rechten Stick liegen NICK und ROLL:
Nun folgt die Erkennung der der einzelnen Steuereingaben und des Flugmode-Schalters. Hierzu die einzelnen Anweisungen des Assistenten folgen. Wird der jeweilige Kanal / Imput erkannt, springt der Assistent automatisch zur nächsten Einstellung. Wenn Schalter nicht belegt sind, kann auf Next/Skip geklickt werden. Es kann sein, das ein Kanal / eine Steuereingabe seitenverkehrt reagiert. Dies sieht man in der grafischen Darstellung. In diesem Fall kann man für diesen Kanal die Eingabe „invertieren“.
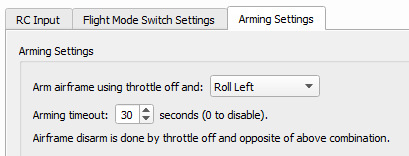
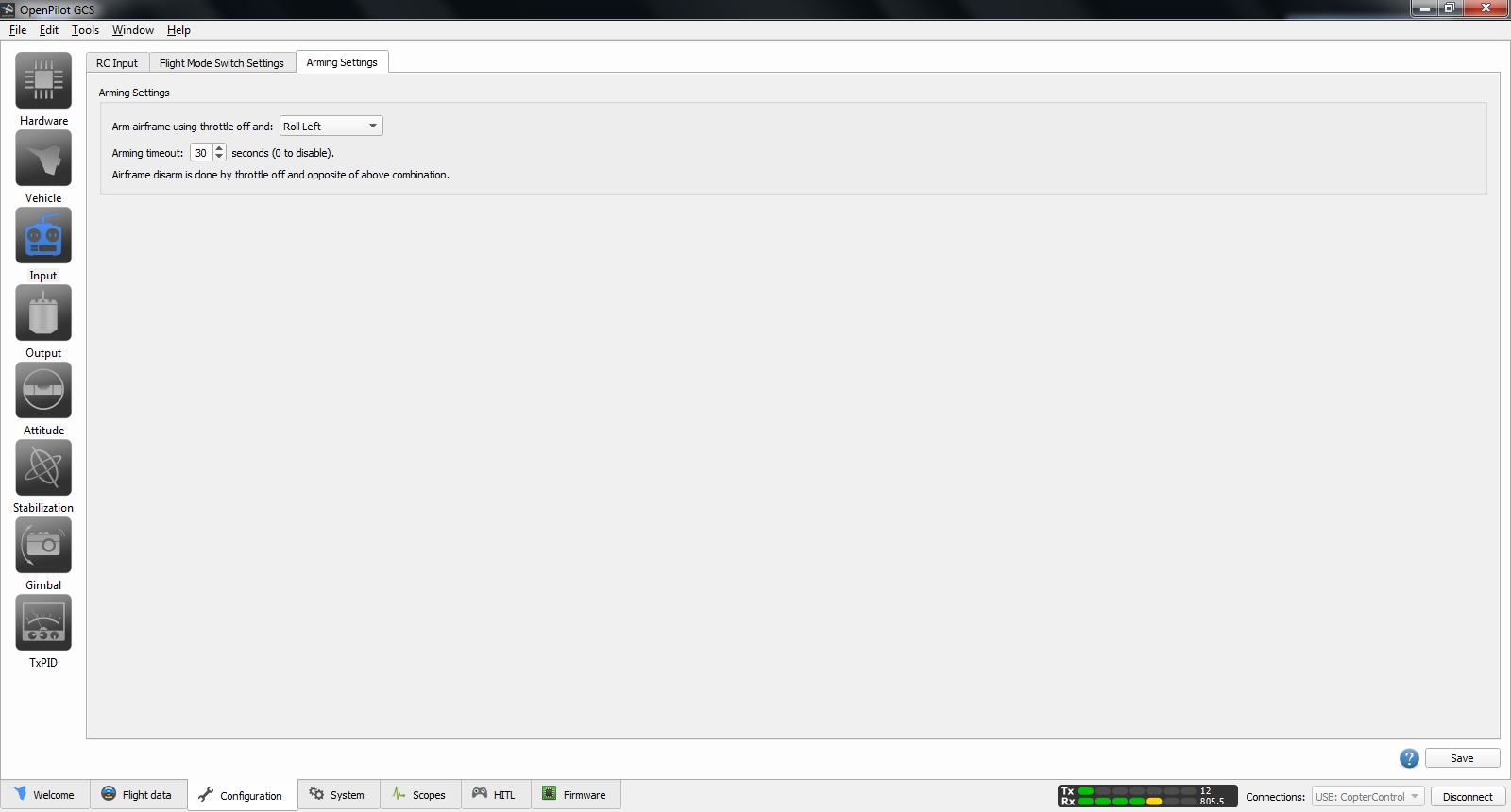
Jetzt muss noch das Arming Setting definiert werden, also das „scharf Schalten“ der Motoren. Im Auswahlfeld stehen verschiede Knüppelbewegungen zur Auswahl. Ich habe für mich Roll Left entschieden. Das „Arming“ ist eine Vorsichstmaßnahme, damit die Motoren nicht anlaufen, wenn man aus versehen an den Gas-Stick kommt. Entschärfen kann man übrigens auch wieder, in dem man den entgegengesetzten Befehl ausführt:
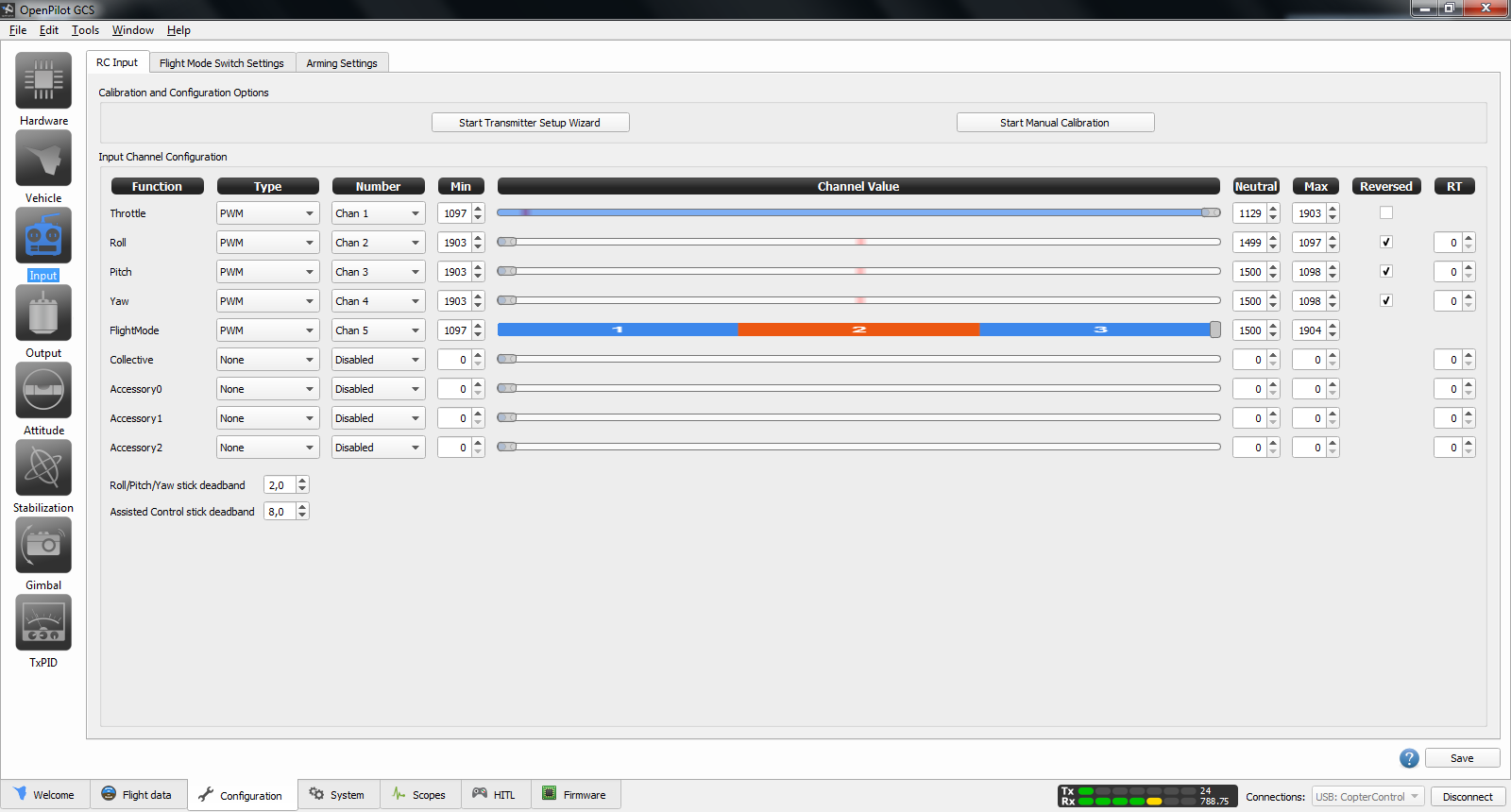
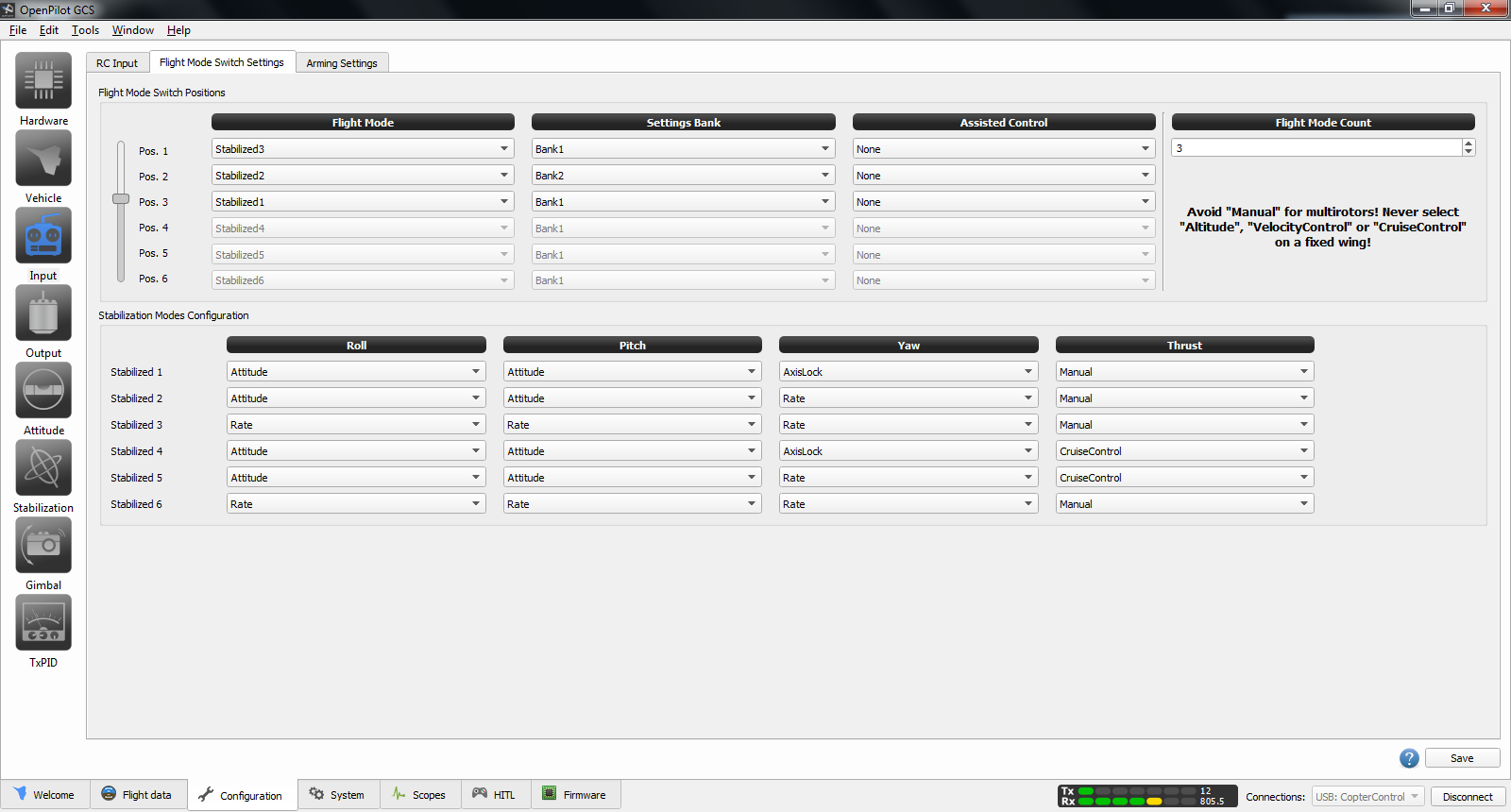
Über die Seiten „RC Input“ und „Flight Mode Switch Settings“ können alle Steuereingaben und Schaltermodi manuell angepasst werden. Jede Stick und Schalterbewegung wird zur Kontrolle in den Einstellungsfenstern visuell dargestellt.
Schritt 5 – Einstellungen anschauen und anpassen
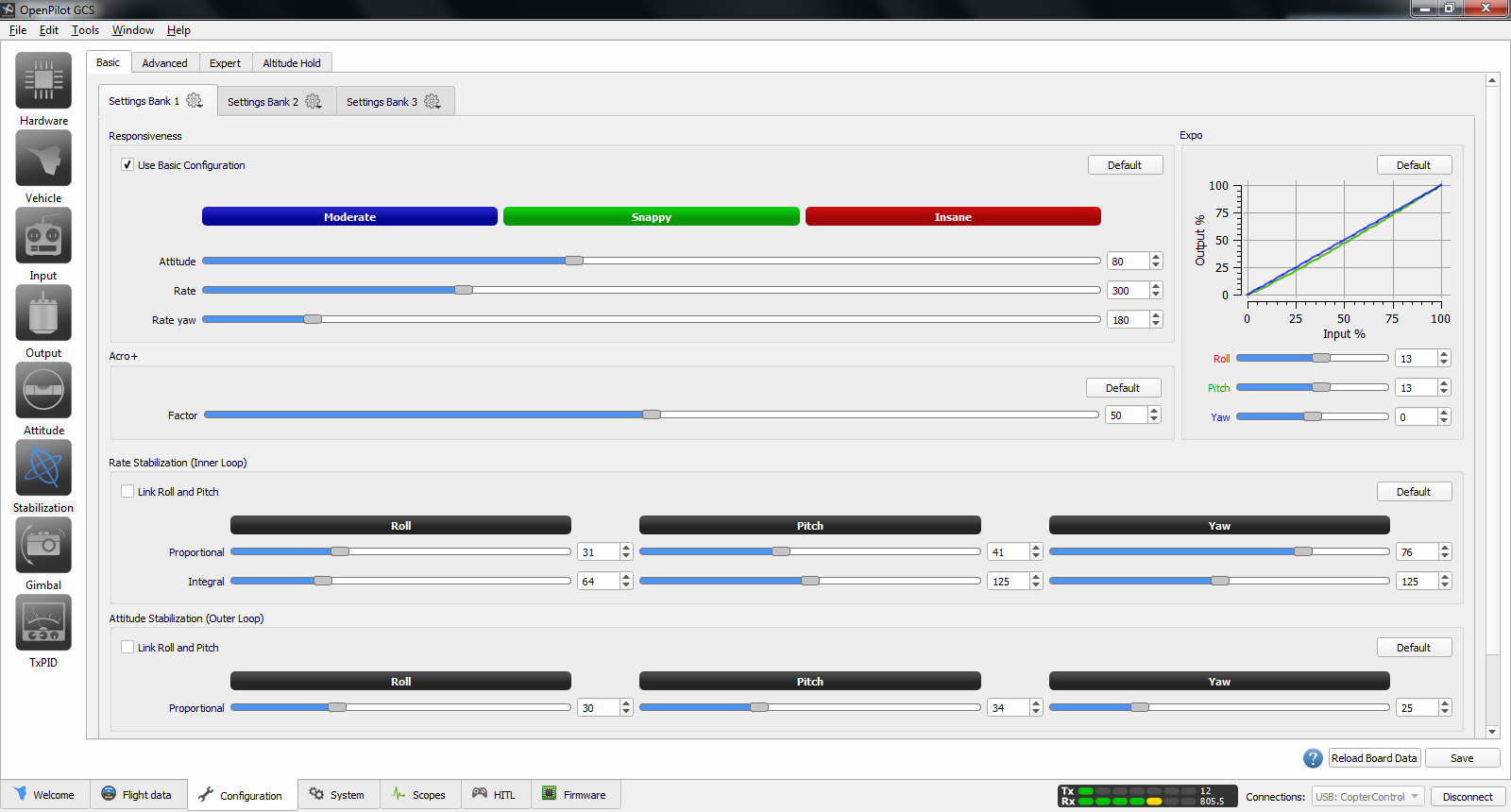
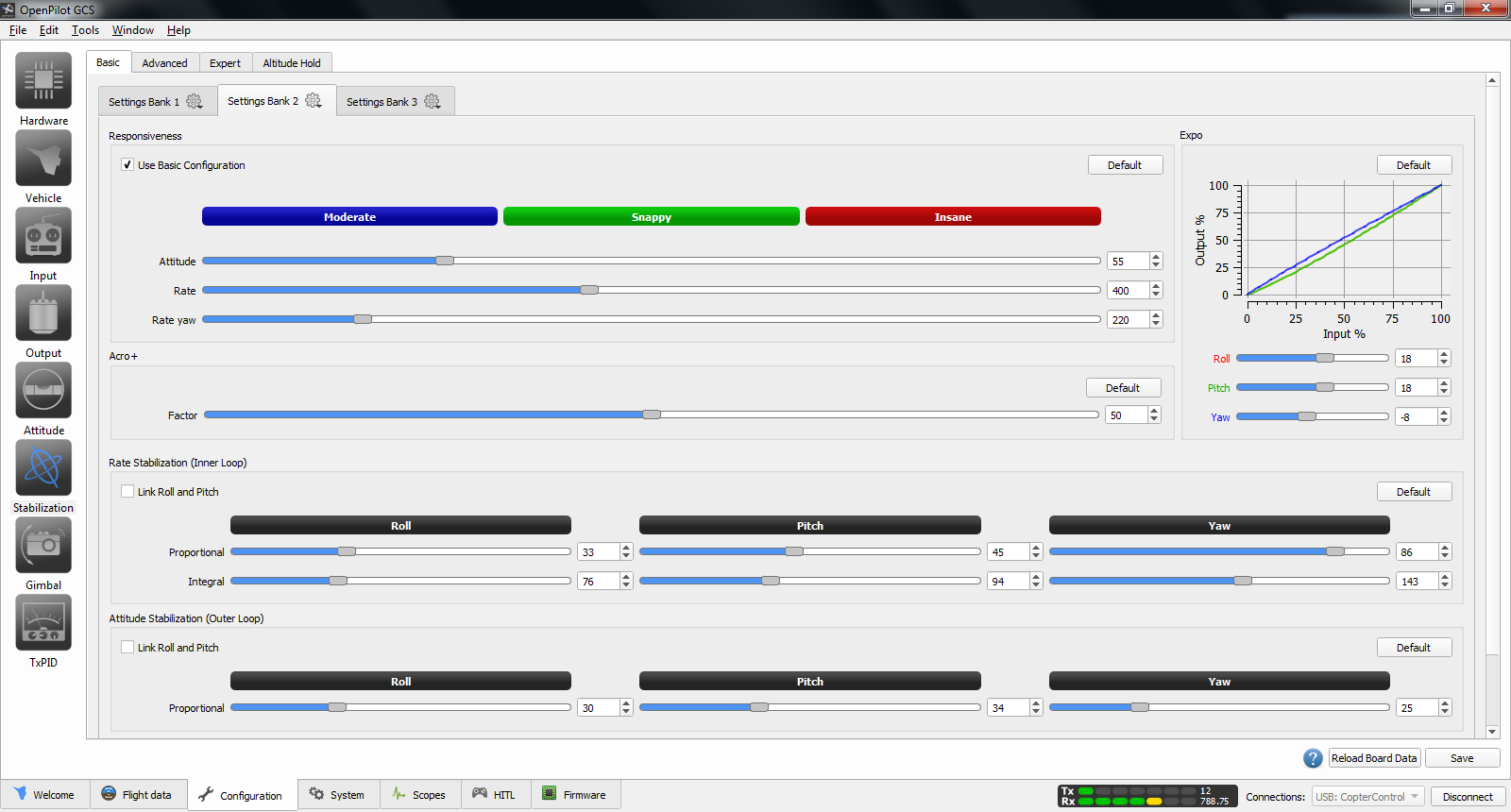
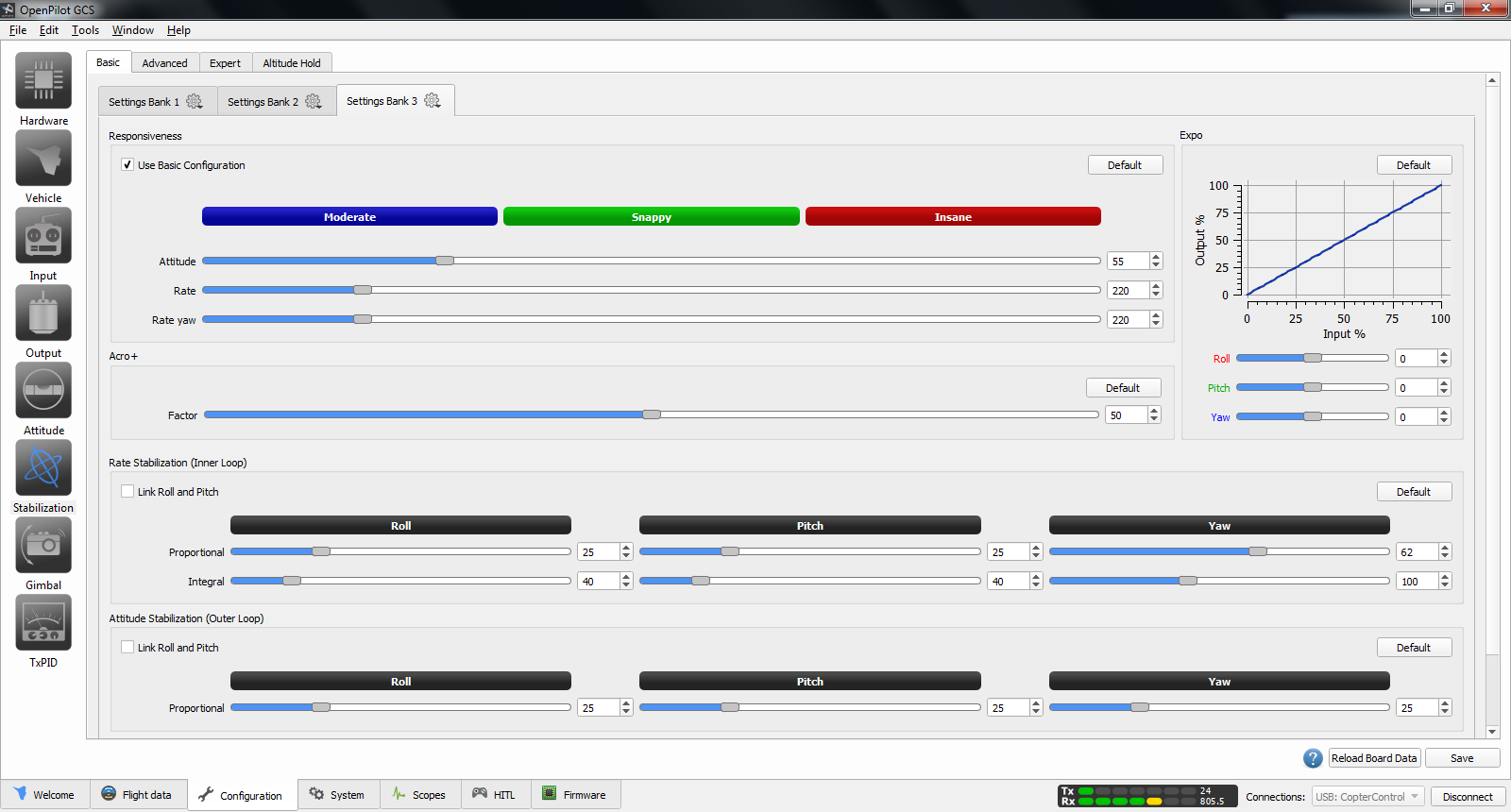
Im Prinzip ist mit den Schritten 1-4 alles erledigt und der Nighthawk 250 ist für einen Probeflug bereit. Wie bei einem neuen Modell üblich, sollte man sich beim ersten Starten langsam mit einem Kopter vertraut machen und antesten wie er auf die Steuereingaben in den verschiedenen Flugmodi reagiert. Wenn man dann etwas Gefühl für den Racer bekommen kann, geht es an das „Feintuning“ der Einstellungen. Mit dem Feintuning und Antesten der einzelnen Konfigurationseinstellungen fange ich nun langsam an. Mein Grundsetup nach der Ersteinrichtung sieht wie folgt aus:
Kapitelübersicht:
- Nighthawk 250 FPV Racer – Lieferumfang
- Nighthawk 250 FPV Racer – Zusammenbau
- Nighthawk 250 FPV Racer – FPV Komponenten
- Nighthawk 250 FPV Racer – Erstfug (noch nicht verfügbar)
14 Antworten zu “Nighthawk 250 FPV Racer – CC3D einrichten (OpenPilot)”
[…] Nighthawk 250 FPV Racer – CC3D einrichten (OpenPilot) […]
[…] Nighthawk 250 FPV Racer – CC3D einrichten (OpenPilot) […]
Wieder eine klasse Anleitung! Danke dafür! Nur wie belege ich die einzelnen Flugmodi und die Schalter des Senders? Ich benutze eine DX6i…das sollte ja dann relativ ähnlich sein zu der DX9i.
Bei der Einrichtung des Sender durch den Wizard müsstest Du ja einen Schalter festgelegt haben. Um zu prüfen welcher Schalter das jetzt tatsächlich ist, kannst du bei der GCS Software in den Bereich INPUT und auf den Tab „RC Imput“ wechseln. Dann am Sender nacheinander alle Schalter einfach mal durchschalten. Im Programmfenster reagiert beim richtigen Schalter dann die Funktion „Flightmode“ durch springen des Balkens.
Wenn die der Schalter am Sender nicht zusagt, kannst Due das im Sender dann auch umlegen. Wie das im Detail geht, kann ich dir nicht mehr sagen, meine alte DX6i habe ich verkauft. Die DX6i wird etwas anders konfiguriert wie die DX9.
Die Anzahl der Flugmodi und die zugeordneten Einstellung selbst definierst Du bei der GCS Software im Bereich INPUT im Tab „Flight Mode Switch Settings“. Das Verhalten der Flugmodi legst du unter dem Bereich Stabilization -> Tab Basic in den Untertabs Settings Bank 1 bis Bank 3 fest.
Super ich danke dir! Das werde ich dann mal so probieren. Nun werde ich ihn erstmal nach deiner Anleitung zusammenbauen.
Hallo Matthias,
aufgrund Deiner Anleitung habe ich jetzt auch zugeschlagen undbestellt! Vielen Dank vorab für die Bauanleitung ohne die ich wahrscheinlich nicht zurecht kommen würde!
Viele Grüße Jörn.
Danke Jörn. Dann wünsche ich gutes Gelingen und viel Freude beim Fliegen.
Hi, erstmal ein dickes Lob für die wirklich saubere Anleitung. Leider habe ich Sie zu spät gefunden 🙁
Ich habe das gleiche Model verbaut das einziges was sich unterscheidet vom Setup is das ich als Radio & receiver folgendes nutze: Turnigy 9X 9Ch Transmitter w/ Module & 8ch Receiver (Mode 2) (v2 Firmware)
Und ich habe den CC3D mit cleanflight konfiguriert.
Ich habe da aber mal eine Frage. und zwar ist einer der Motoren wenn ich starten will das dieser nur zuckt während die anderen sauber laufen. gebe ich mehr als voll gas, ist es danach kein problem. (ich muss anmerken das ich das Fluggerät noch nicht geflogen habe)
Also bevor ich die propeller anbringe und riskiere da s mir alles um die Ohren fliegt, meine Frage: Woran kann das liegen?
Ich habe alle Lötstellen kontrolliert, auch habe ich mal den motor an einen andren ESC gehängt kein problem. Ich kann es mir nicht erklären. Auch die kalibrierung der ESC „eigentlich“ keine besonderen Vorkommnisse.
Hallo Andreas, das kann schon mal vorkommen. Meist liegt es am Motor selbst. Daher regelt man jeden Motor und den ESC zusammen ein. In Cleanflight kann man es nicht so exakt einjustieren wie in Openpilot. Aber es macht in der Regel nichts. Der Kopter sollte sich so fliegen lassen. Gehe mit dem Kopter auf eine große Wiese und probieren es mal langsam aus. Wie verhält er sich in der Luft bei Full-Throttle?
Hallo
Also ich komme aus dem Modellbau und wollte mir auch einen Fpv Race bauen.Nun habe ich schon einmal die Software OpenPilot heruntergeladen aber nun kann ich sie nicht installieren habe einen mac osx 10.6.8. Im Internet konnte ich auch keine Infos bekommen.
Wissen Sie vielleicht irgendwelche probleme darüber.
Hallo Christoph. Ich habe keinen Mac und kann daher keinen Rat geben.
Hallo Christoph!
Einfach mal deinen Mac auf ein aktuelles OS updaten wie Yosemite (OS 10.10) oder El Capitan (OS 10.11). Benutze nämlich letzteres und OpenPilot läuft bei mir.
Gruß Carsten
Hey ich habe einen flugfertigen copter der aber mal bischen tuning braucht mein bedenken ist nur das er danach nicht mehr gut fliegt was er ja tut . Komme nicht an das cc3d dran da ich die alte version von openpilot nicht finde und der Vorbesitzer es nicht genau sagen konnte welche er mal dafür benutzt hatt viele getestet keins gefunden
Cc3d
12a escs
2204 2400kw
Nighthawk 250ger halt sollte er soweit sauber starten mit dem zmr250 setup und geht es da nur um modis die mann sich selber belegen sollte wie Horizon oder angel oder doch um pid tuning bin neu im copter bereich und breuchte mal kleinen tipp
LibrePilot ist der „Nachfolger“ von OpenPilot. Ggf. kommst du damit weiter. Mit LibrePilot kannst du die Firmware des CC3D auch neu flashen. Zwar musst du dann wieder alles einstellen, aber dann klappt es auf jeden Fall.