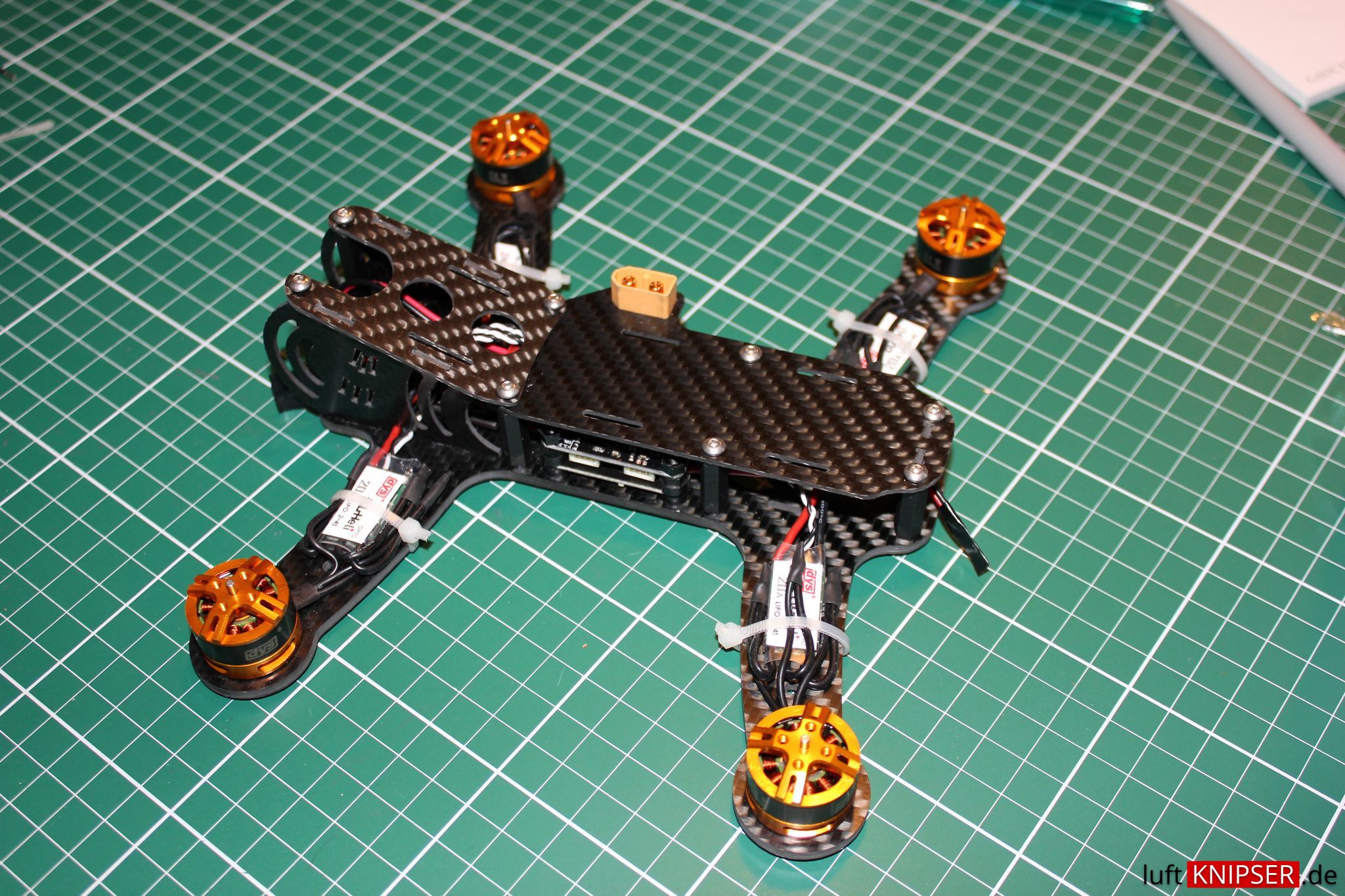
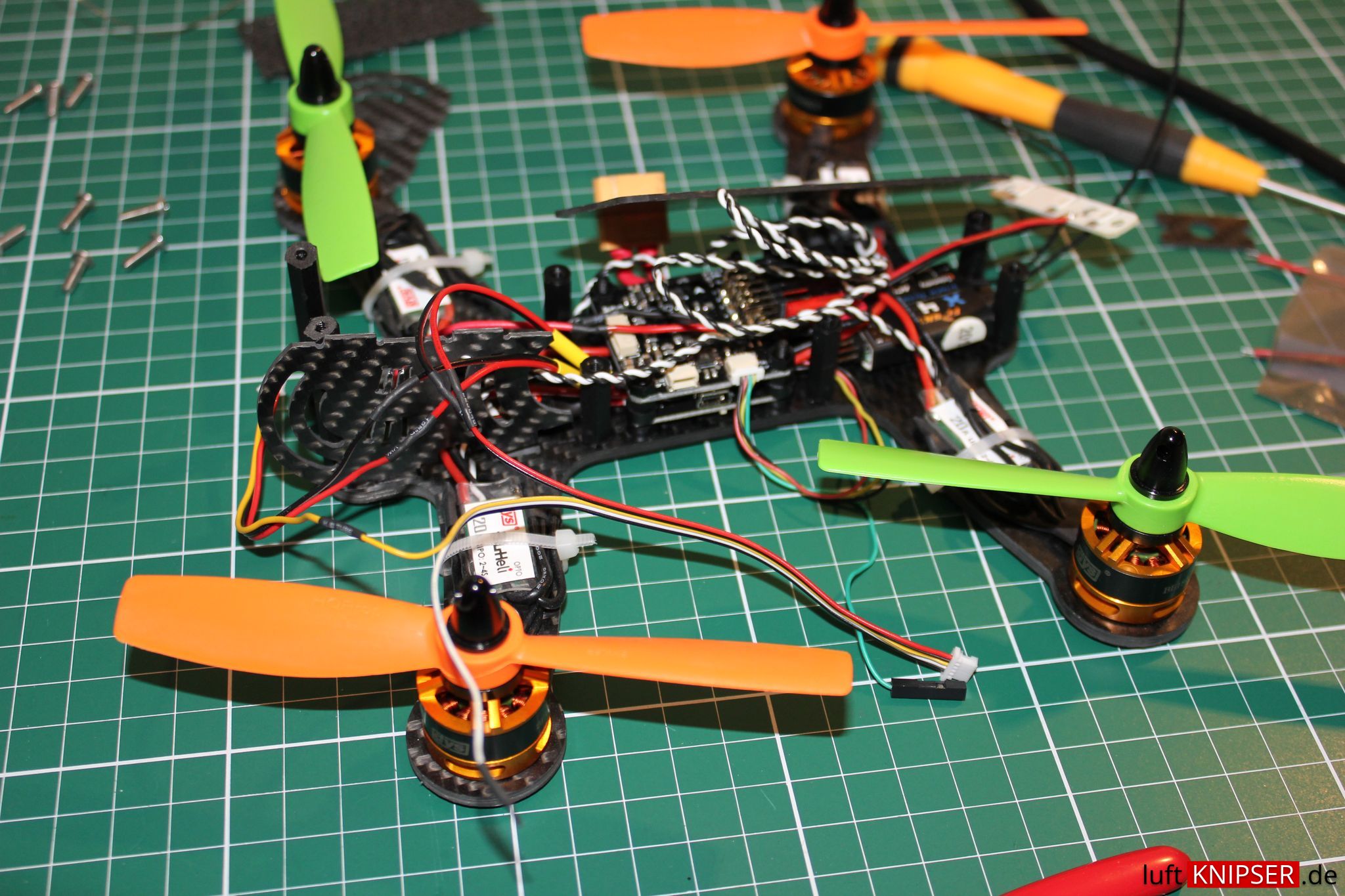
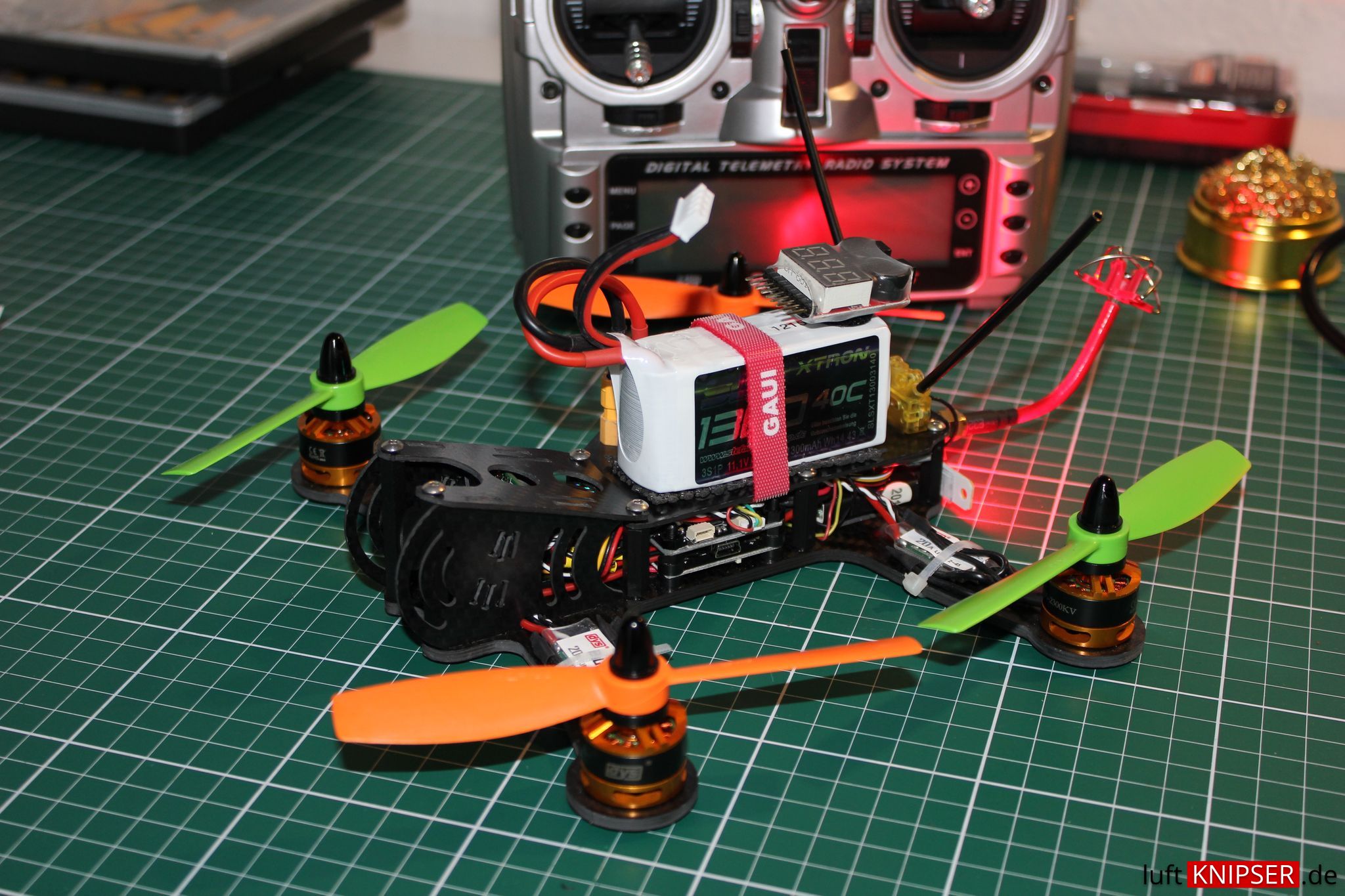
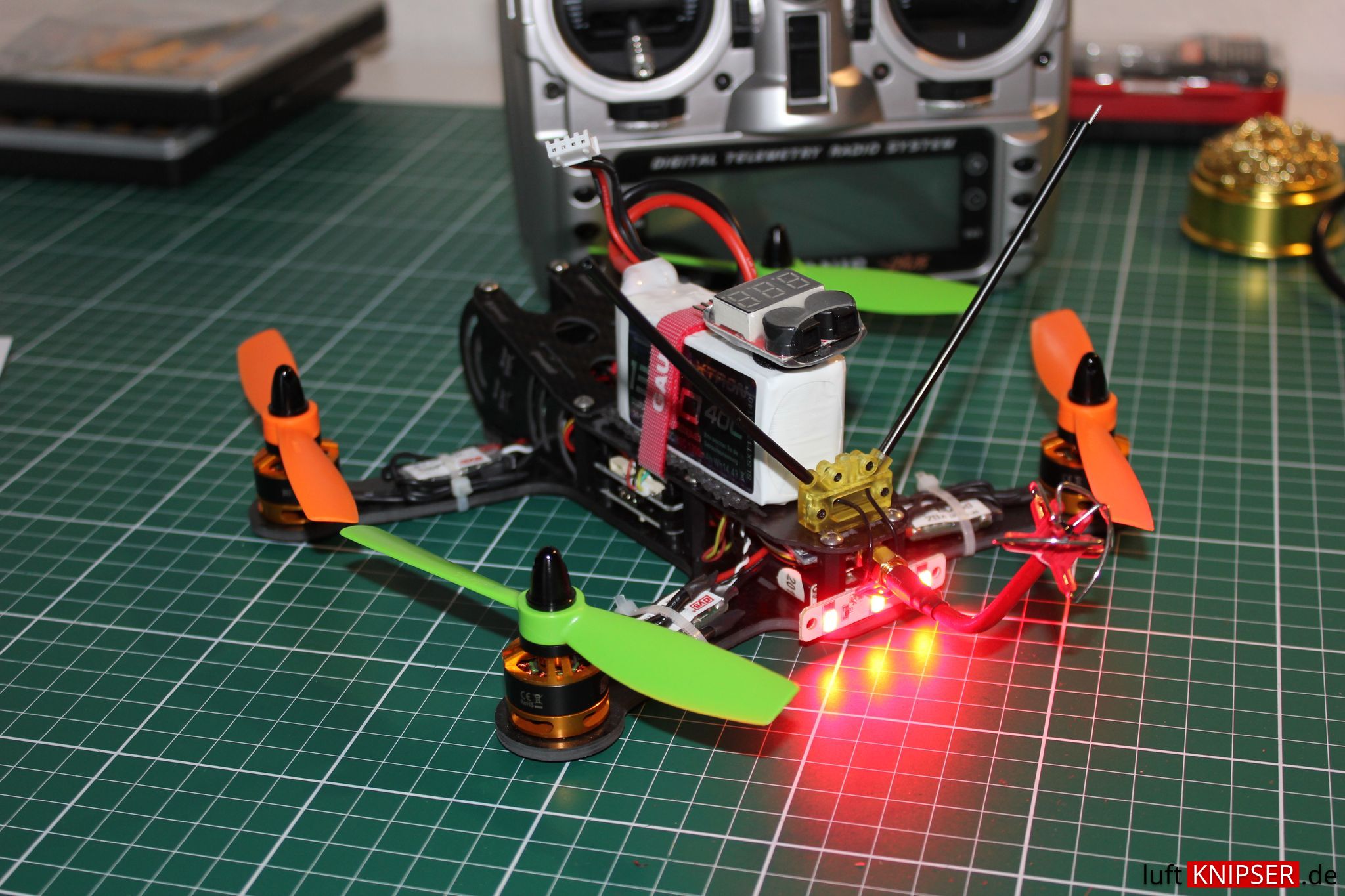
Einen kleinen FPV Racer bauen war die Idee. Als Frame habe ich mich für den CP210 von Carbon Posten entschieden. Er besteht vollständig aus Carbon. Die Hauptplatte hat eine Carbon-Materialstärke von 3mm. Alle weiteren Platten haben eine Stärke von 1,0mm bis 1,5mm.
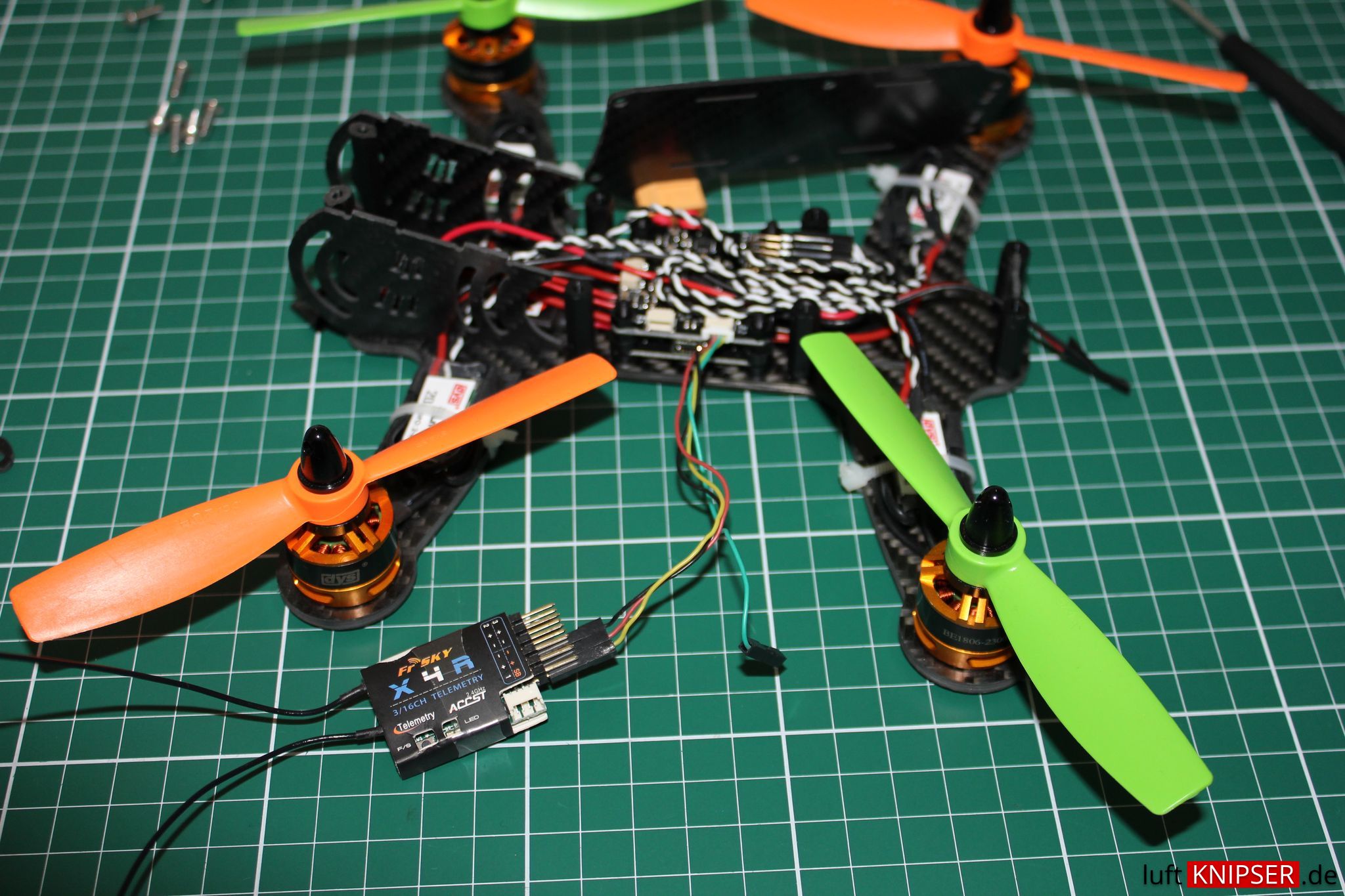
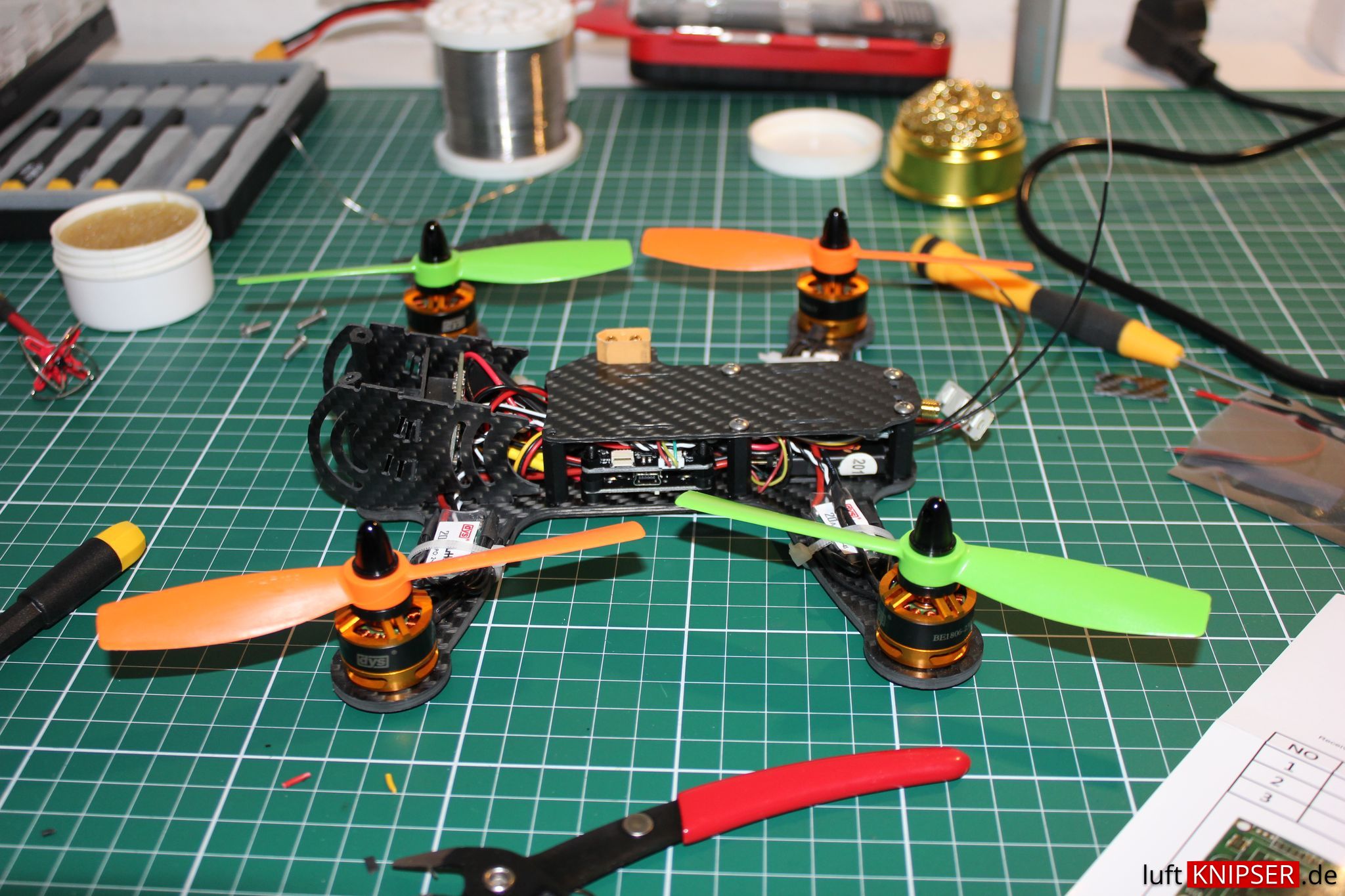
Als Antrieb für den Kopter dienen vier dys BE1806 2300KV Brushless Motoren mit 5 Zoll Bullnose Propellen von HQ. Die Regler (ESC) kommen dys 20A mit BLHeli Firmware zum Einsatz. Als Flightcontroller ist der CC3D EVO verbaut.
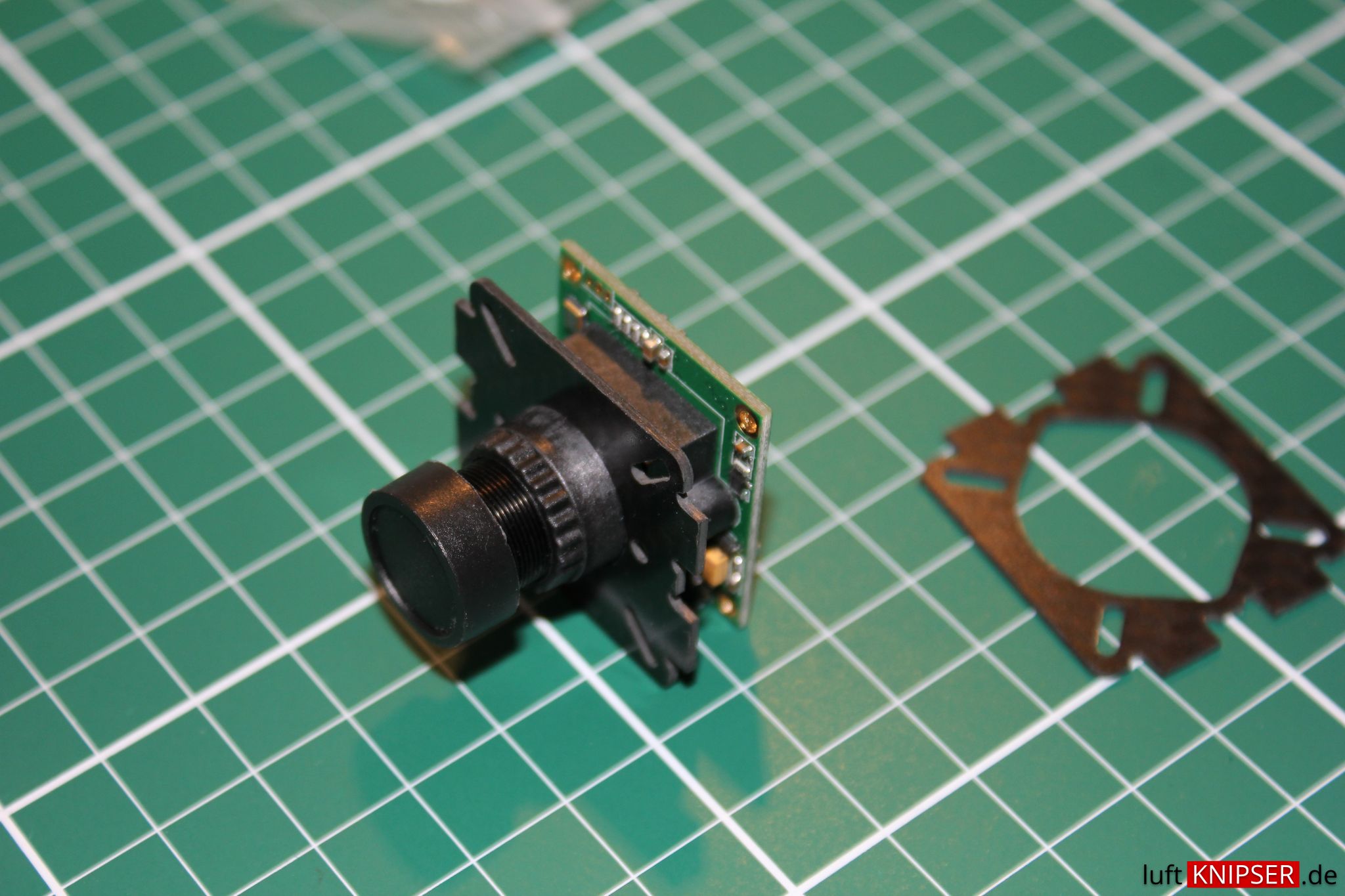
Die PZ0420M FPV Kamara und ein Mini VTx (Skyzone TS5831S) sorgen für das FPV Live-Bild.
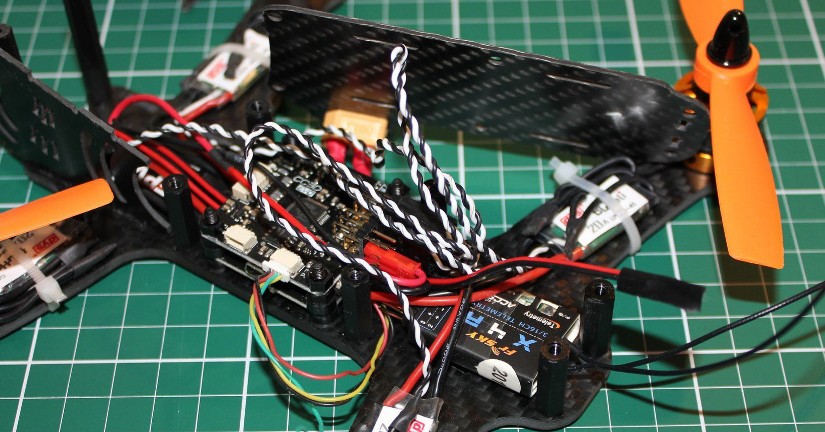
Der Rahmen
Alle Rahmenteile sind sehr sauber gearbeitet. Die Hauptplatte macht einen sehr soliden Eindruck.
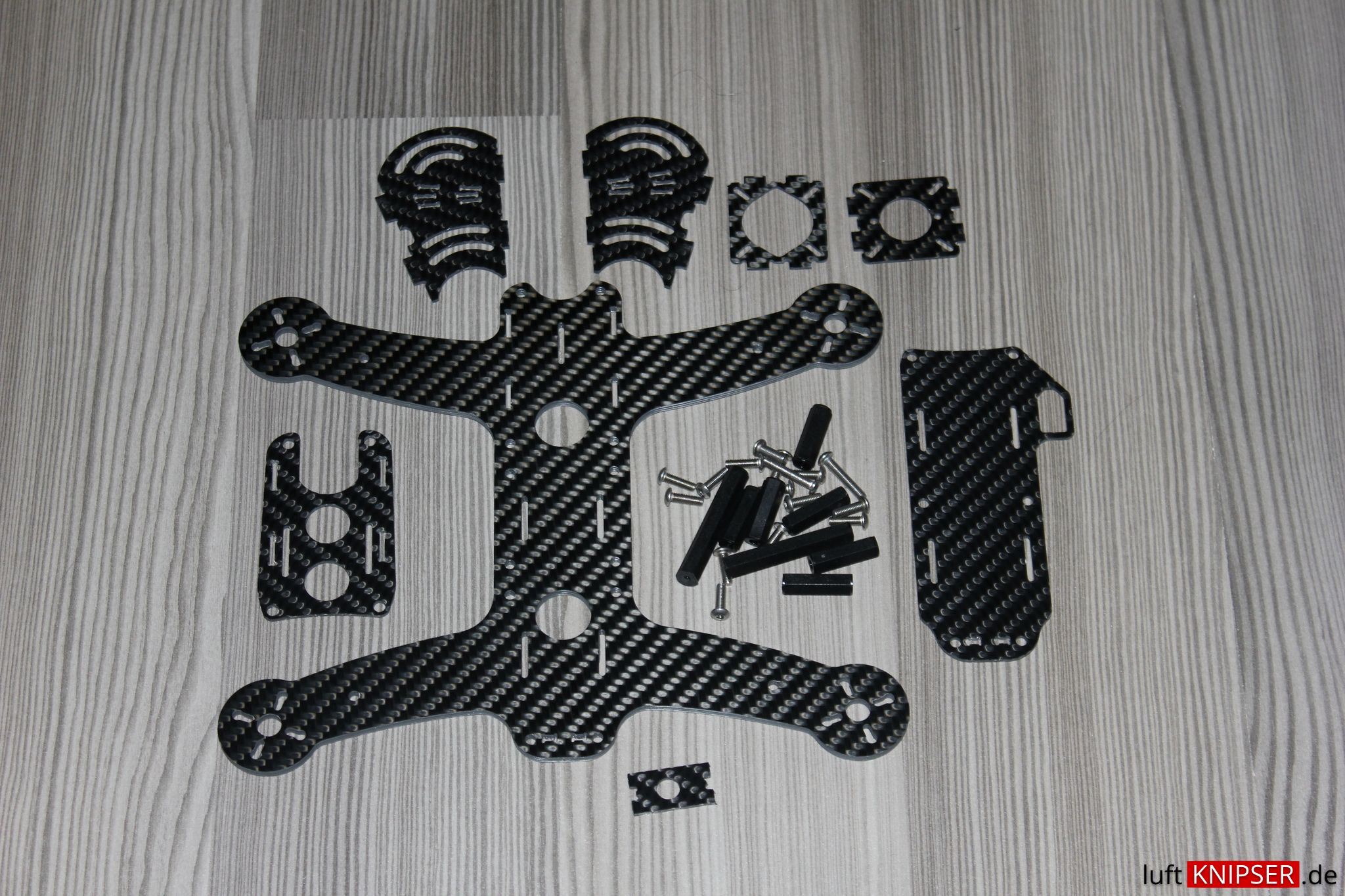
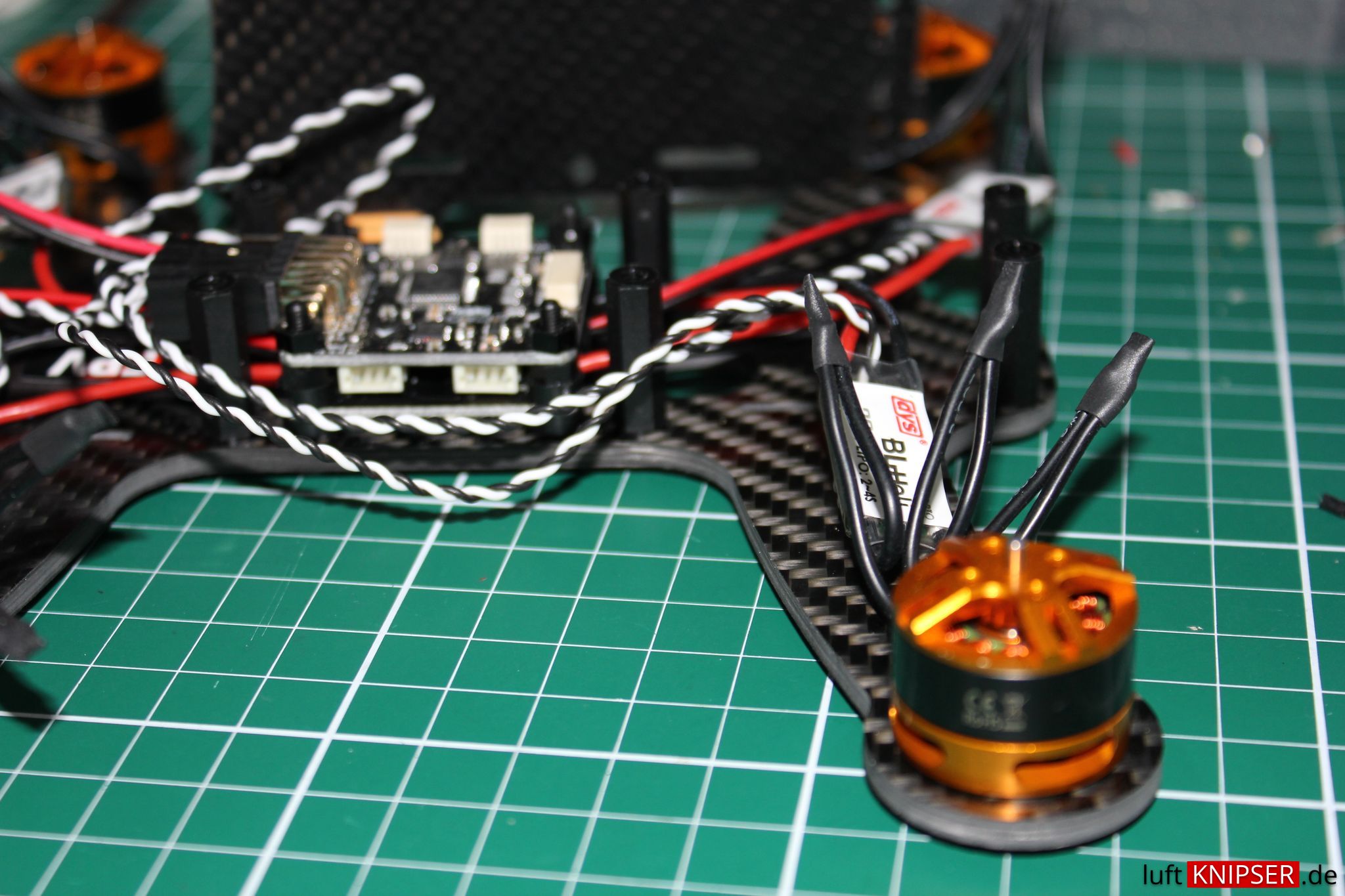
Die Brushless Motoren
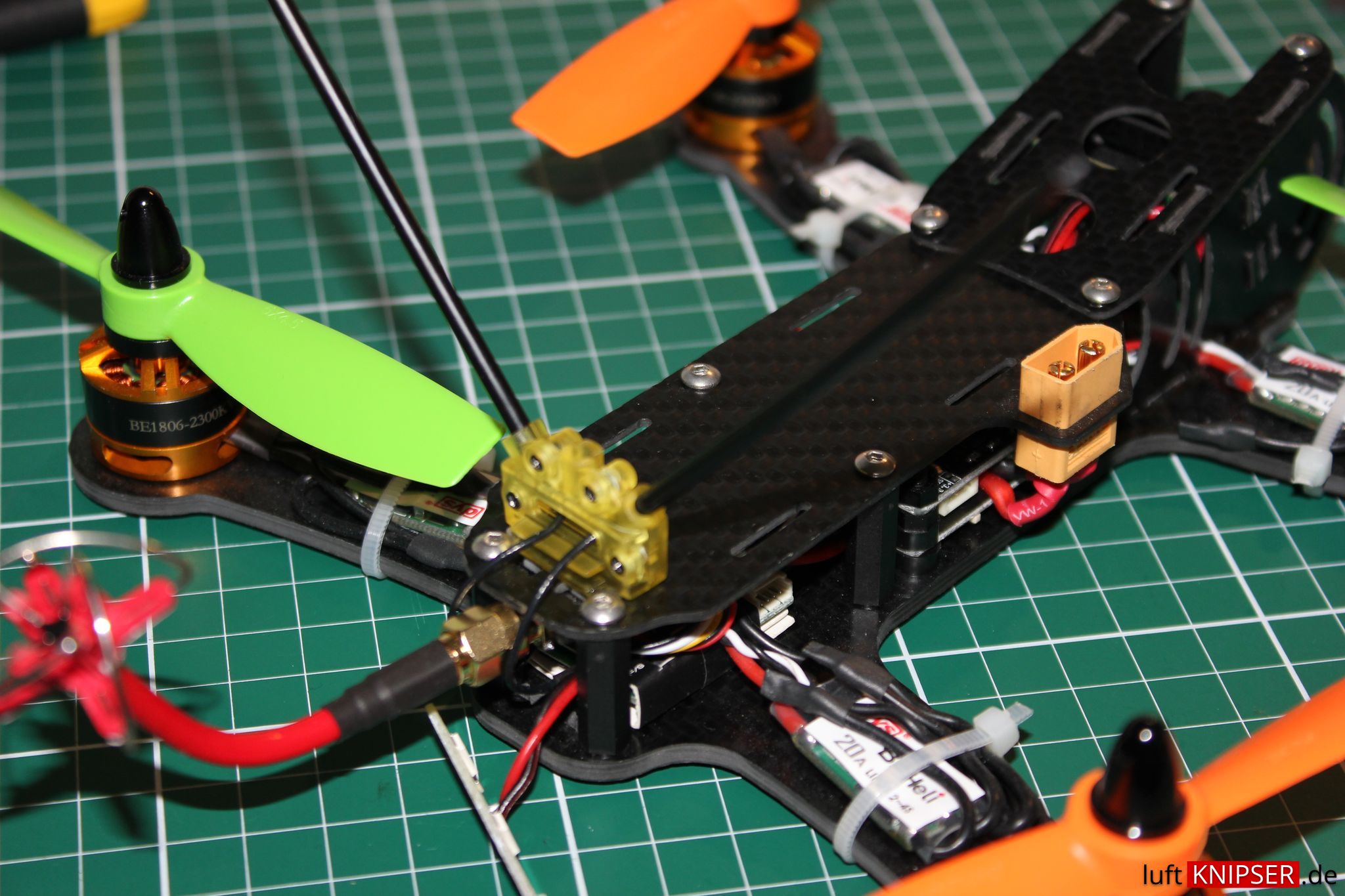
Die dys BE1806 2300KV Brushless Motoren gibt es in verschiedenen Farben. Bisher habe ich diese in Schwarz, Gold und Rot gesehen. Für dieses Projekt habe ich mich für die „Goldenen entschieden. Mit etwas Schraubensicherung für die Schrauben habe ich die dys Motoren dann an der Hauptplatte des CP210 montiert.






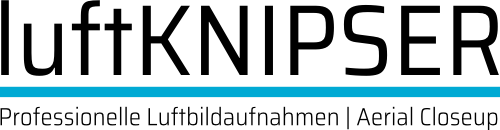
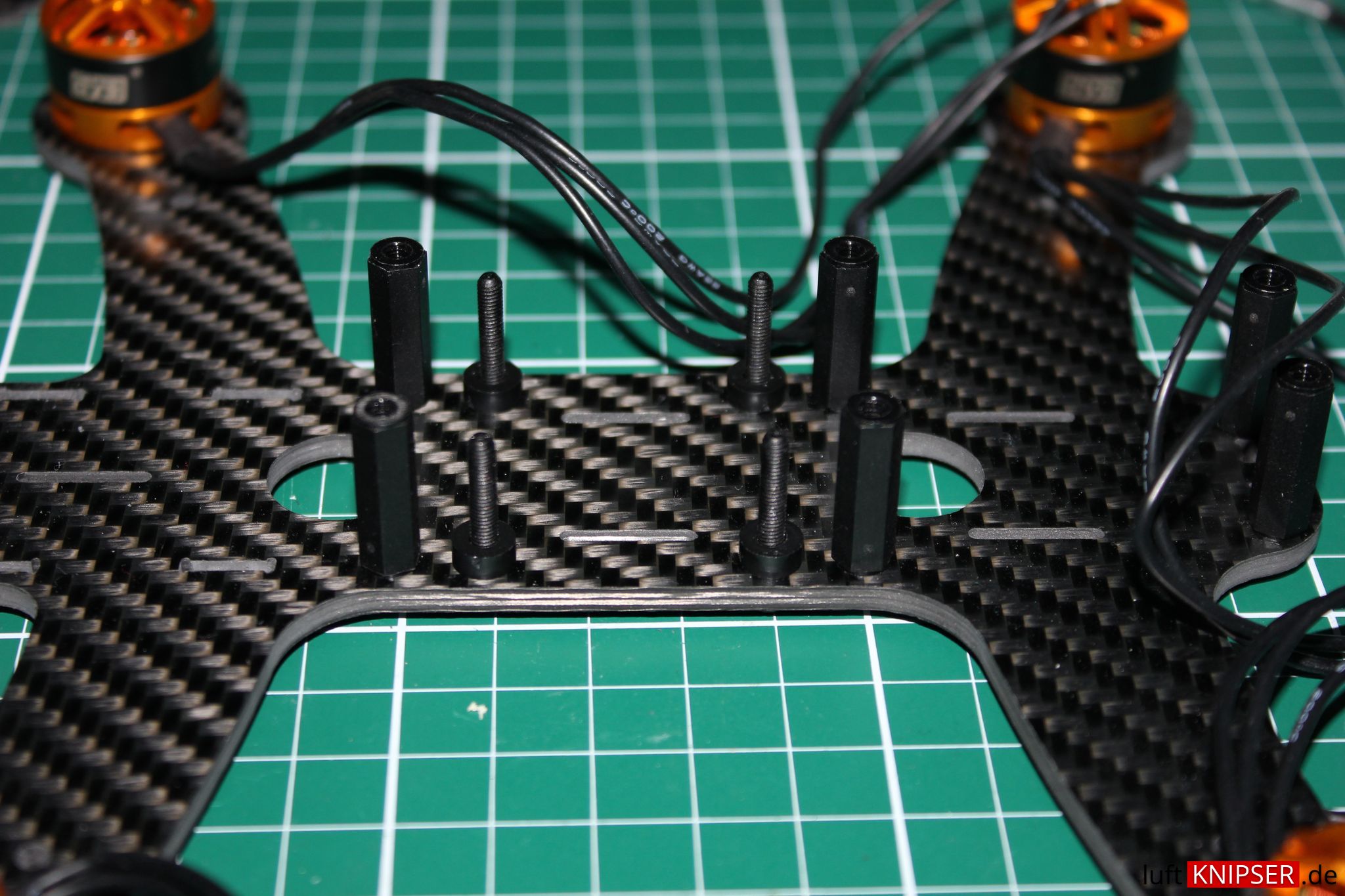
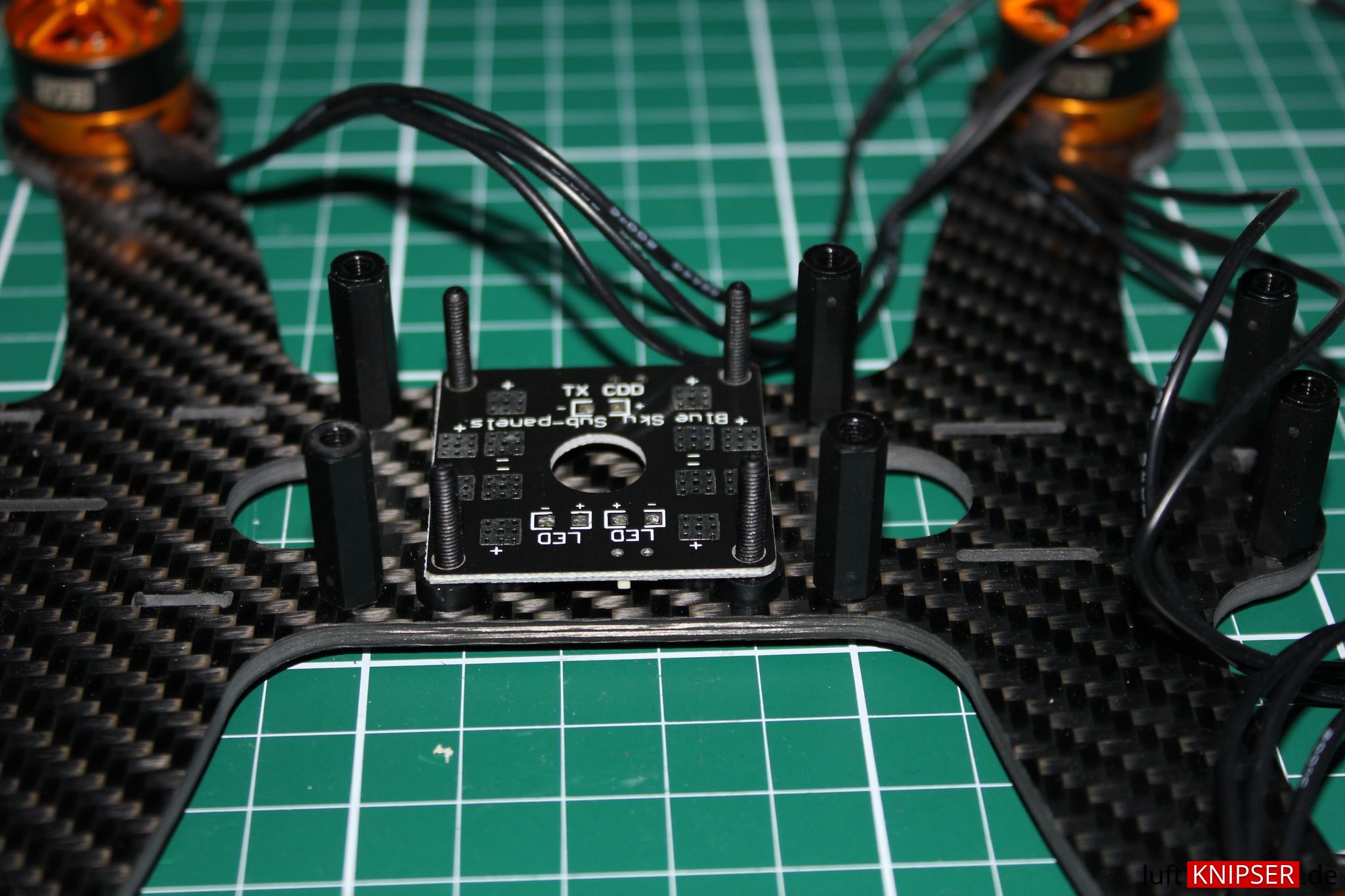
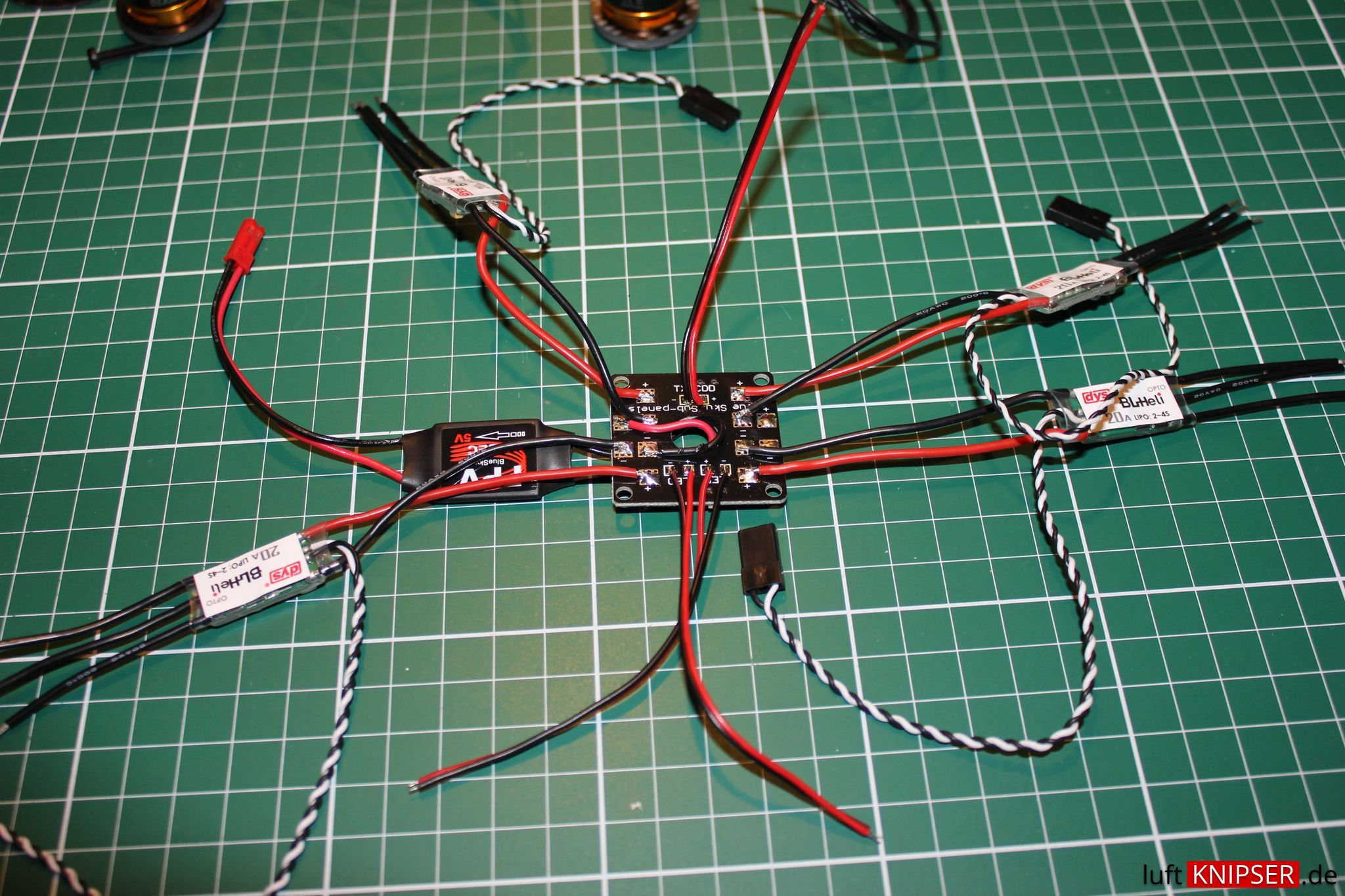
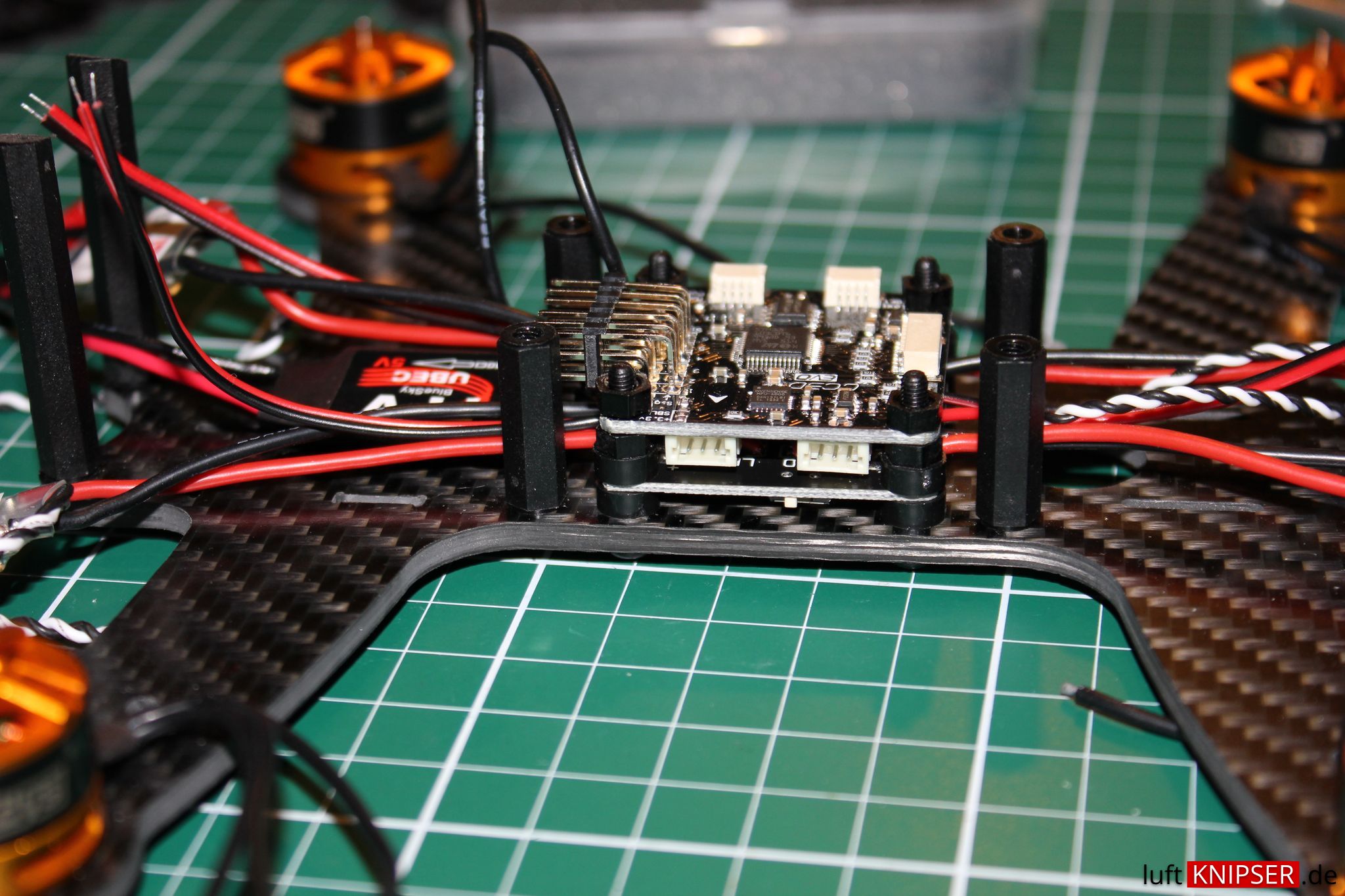
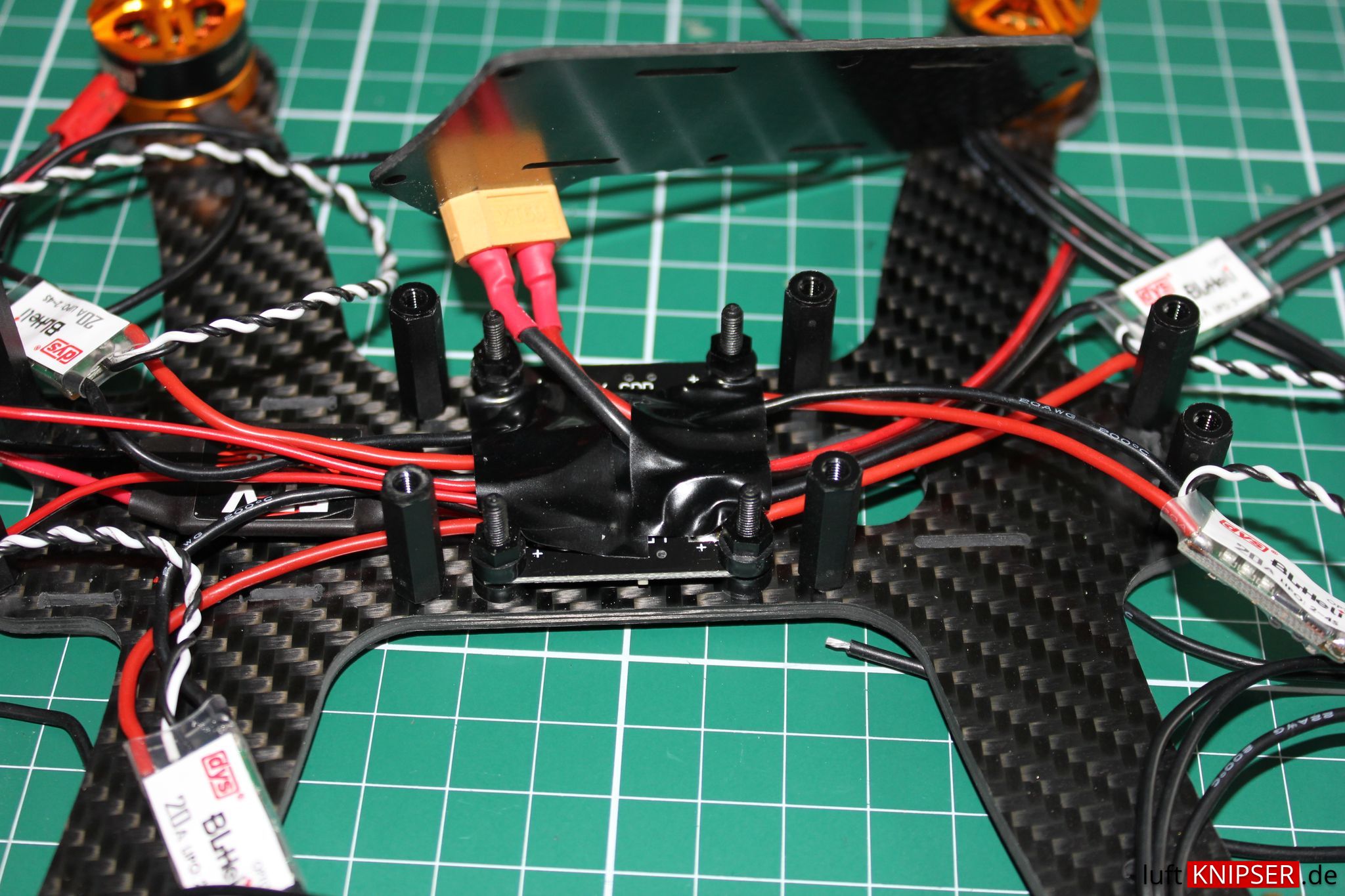
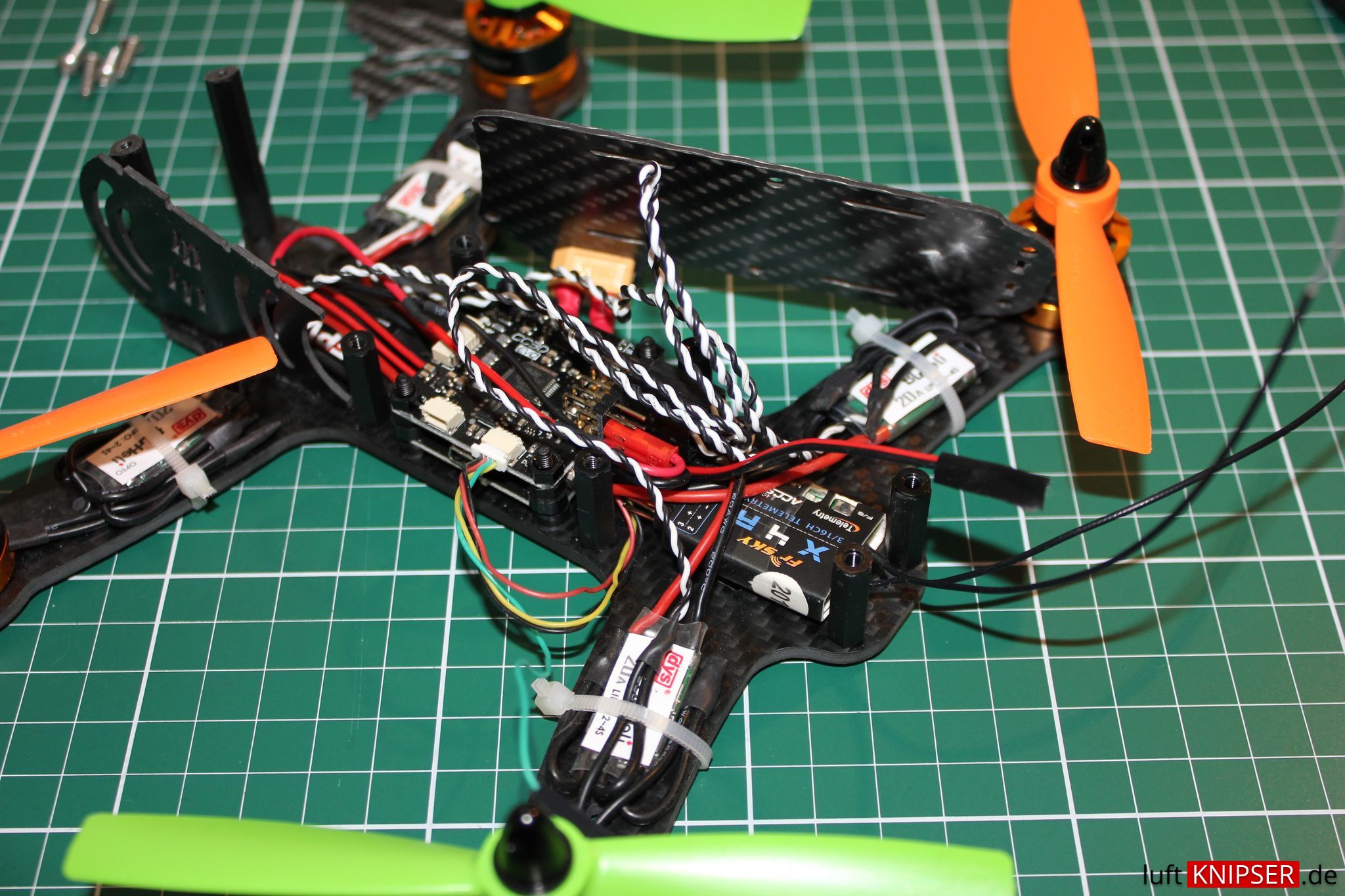
Powerboard, ESC und Flightcontroller
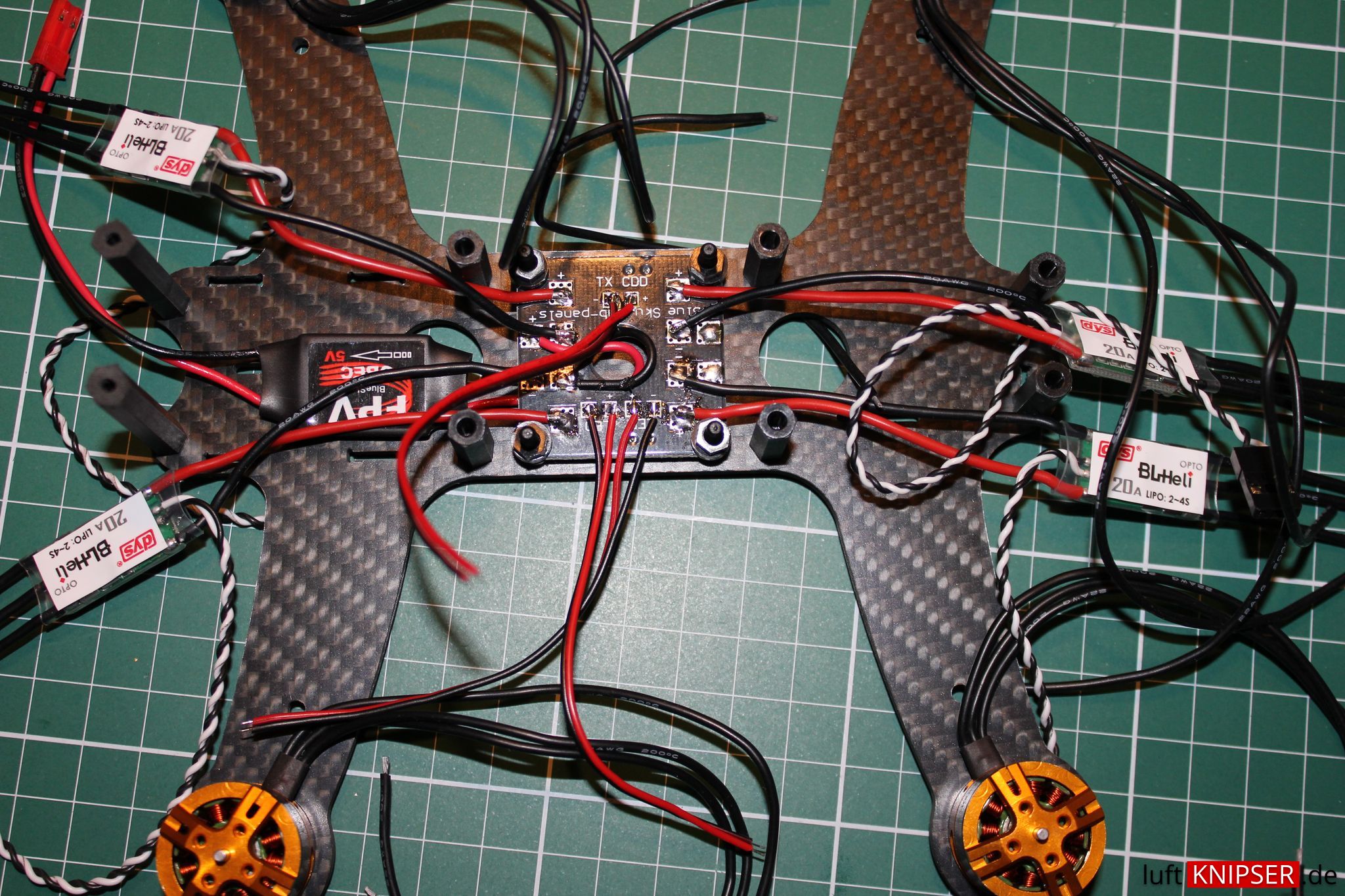
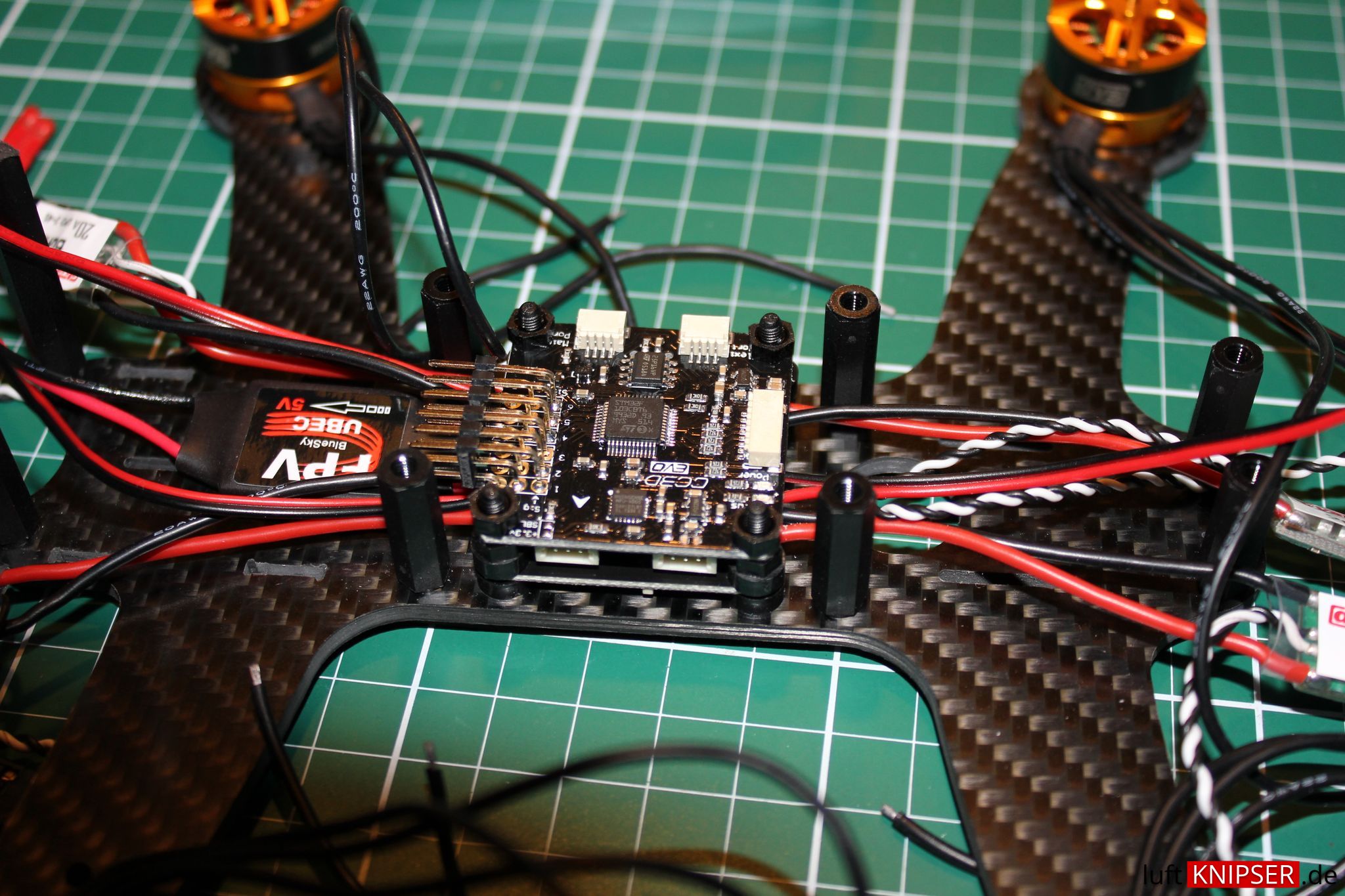
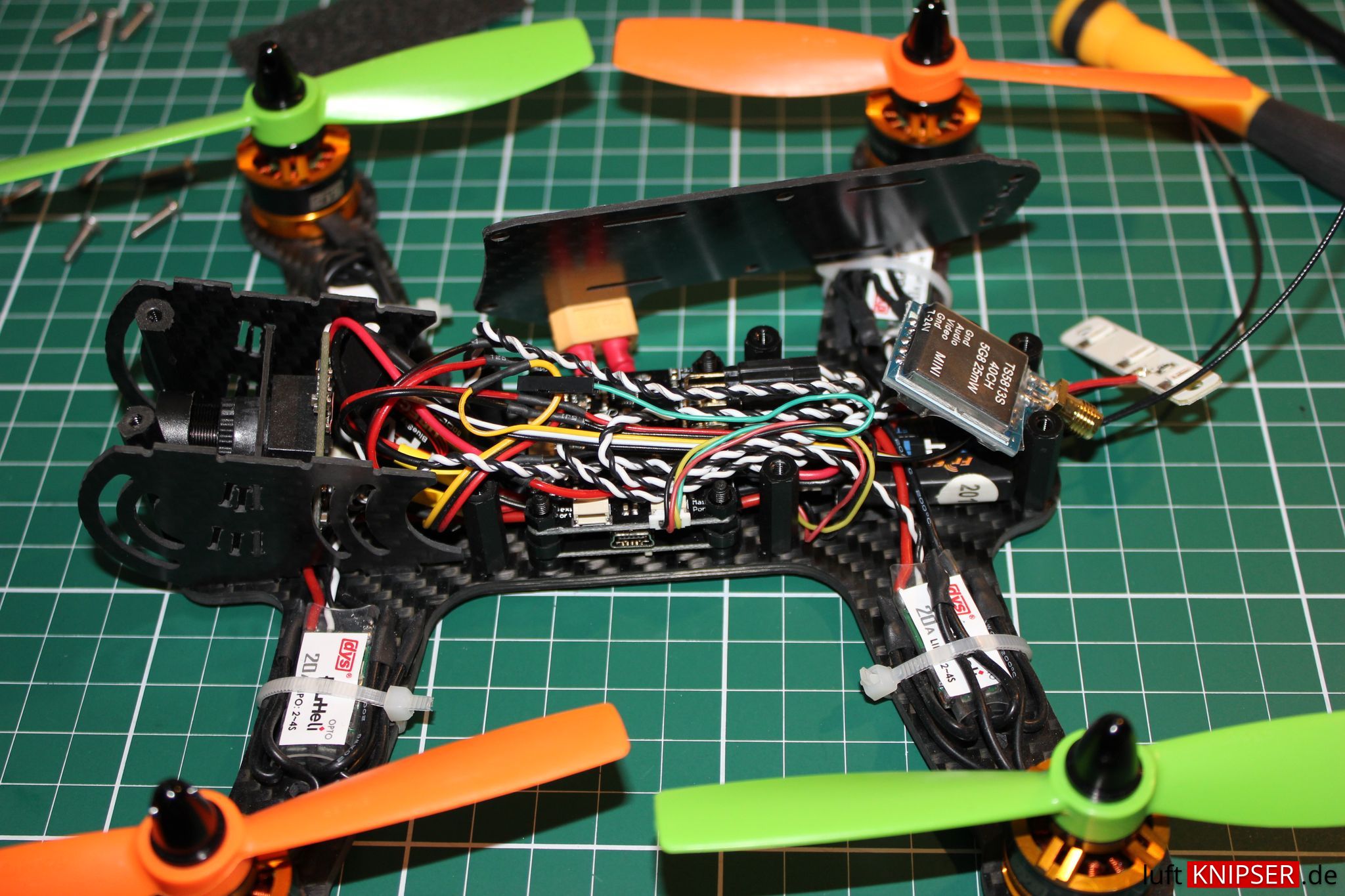
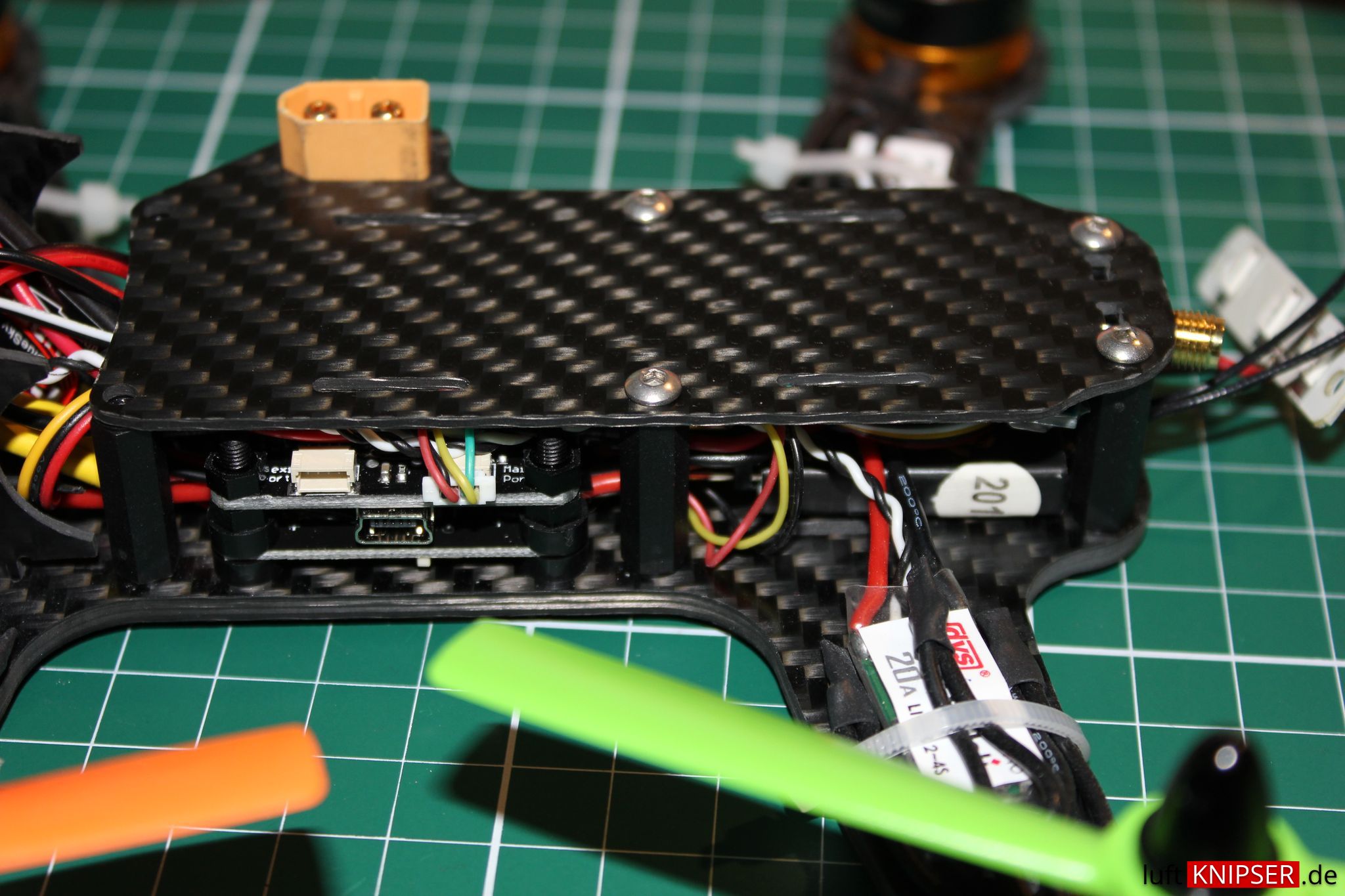
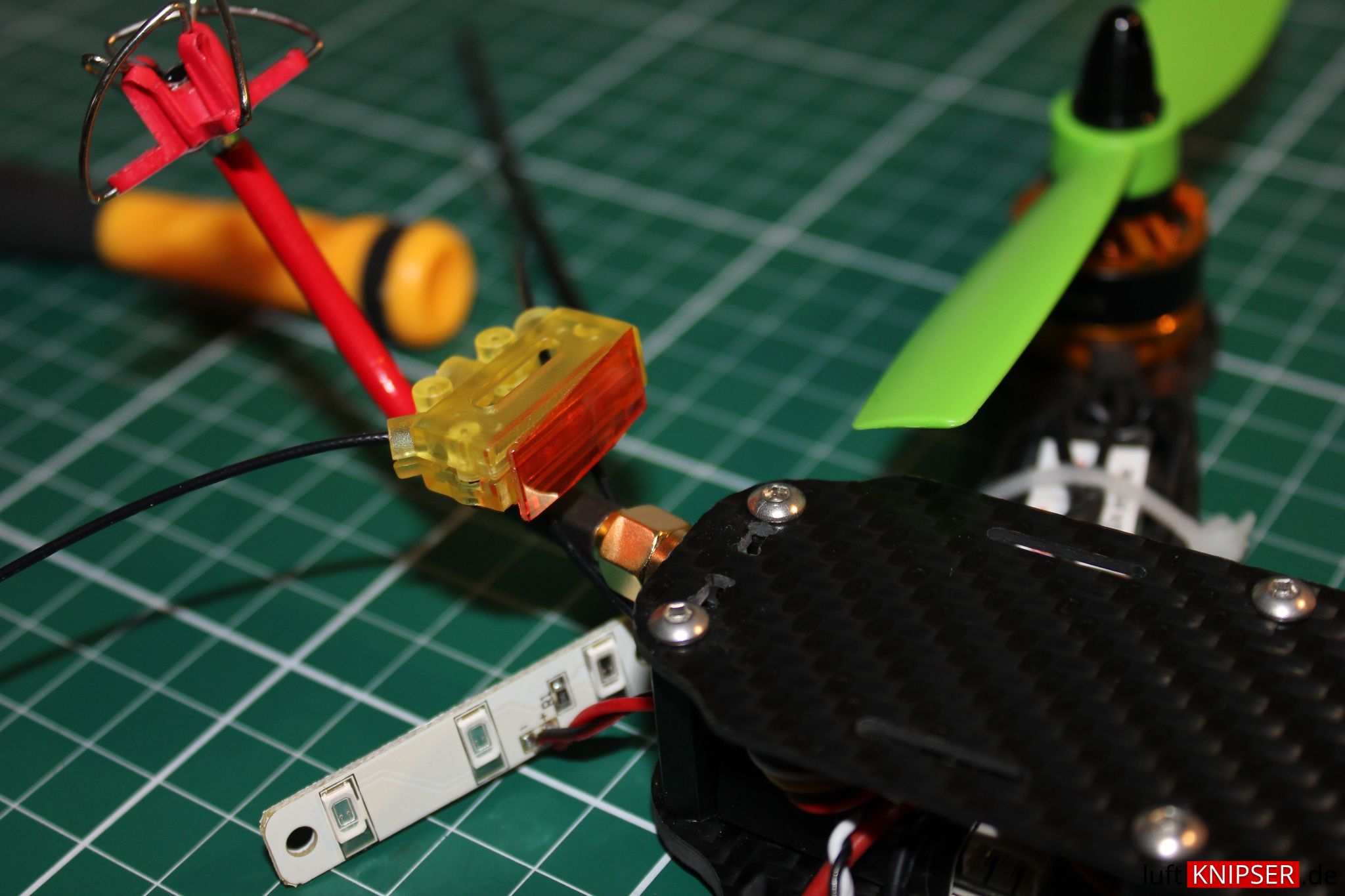
Das PDB (PowerDistributionBoard) und der Flightcontroller werden mit Nylon Schrauben und Abstandshalter auf der Hauptplatter verbaut. Da die dys 20A ESC keinen BEC für die Stromversorgung des CC3D EVO Flightcontrollers haben, habe ich zusätzlich einen einzelen Spannungswandler (BEC) an das PDB angelötet. Man muss ein wenig ausprobieren, welche Einbaurichtung für das CC3D am besten ist. Anfangs hatte ich den CC3D so verbaut, dass die ESC Anschlüsse nach Vorne (Nase des FPV Racers) zeigen (siehe Bilder). Doch im Laufe des Bauprojekts habe ich die Einbaurichtung um 180 Grad gedreht, denn der XT60 Anschluss hatte vorher den USB Anschluss des CC3D verdeckt. Wenn die Einbaurichtung des CC3D nicht gemäß Symbol auf der Platine ist, muss man später in Openpilot oder entsprechend der verwerwendeten Firmware des FC entsprechend einstellen (YAW Einstellung).
Nach dem Einsetzten des PDB, habe ich dieses vorsorglich mit Isolierband abgeklebt, da es doch schon sehr nah am Flightcontroller sitzt und ich sicher gehen möchte, dass kein Kontakt von den Bauteilen einen Kurzschluss verursacht. Der XT60 Stecker ging erst nicht in die vorgesehene Aussparung der Deckplatte. Diese musste ich mit einer Nagelfeile noch etwas bearbeiten. Die Kabel der ESC´s und der Motoren haben ich eingekürzt und dann verlötet. Vorsorglich habe ich diese nicht zu knapp angeschnitten, um im Fall einer Ausbesserung oder Reparatur noch etwas Reserve zu haben. Die richtige Drehrichtung der Motoren ist vor dem festen verbauen der Teile vorsorglich zu prüfen und bei Bedarf durch Umlöten der Kabel anzupassen.
Videotransmitter, FPV Cam und Rx Empfänger
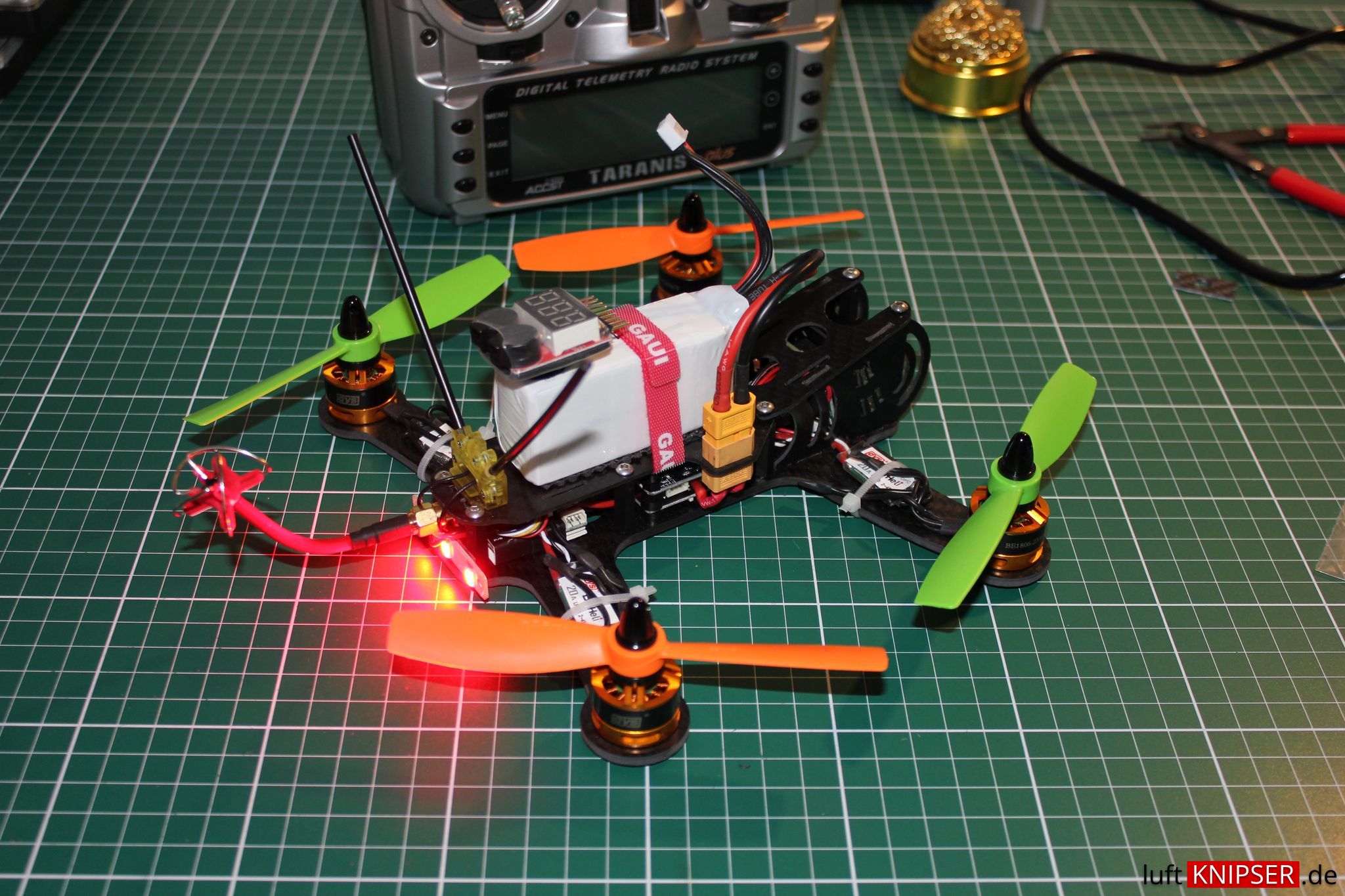
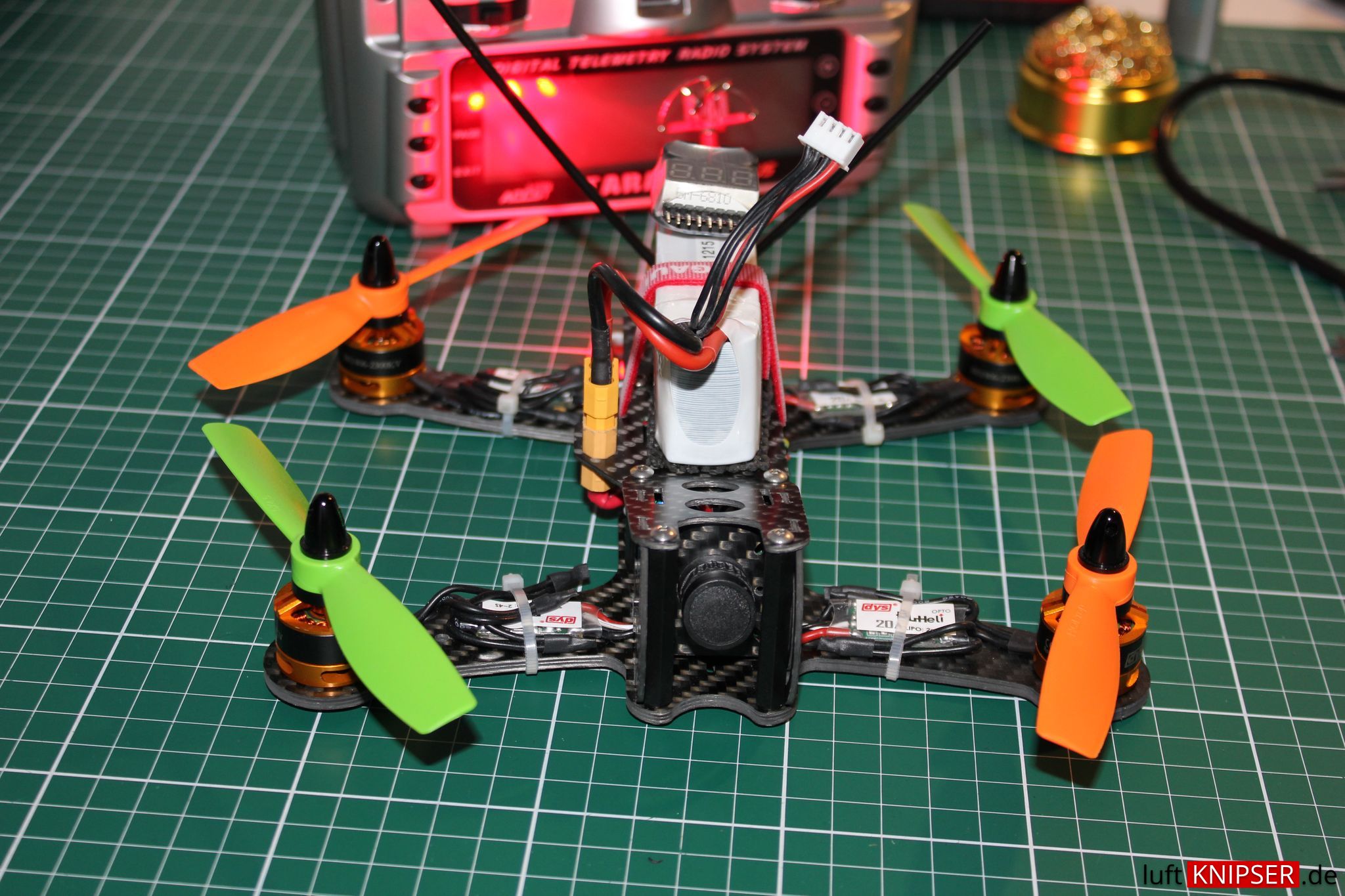
Als Empfänger für den Racer kommt der FrSky X4R (Sender ist eine Taranis) zum Einsatz. Angeschlossen wird er per SBUS am Mainboard des CC3D EVO. Seine Einbauposition im im Heck des CP210. Dort passt er gerade so zwischen CC3D und den Spacern am Heck hinein. Die Carbonplatte mit der Bohrung für die Antenne an den Videotransmitter musste ich jedoch weg lassen. Stört aber auch nicht. Beim CC3D EVO Flightcontroller war als Zugabe noch eine Antennenhalterung dabei. Diese konnte ich bei diesem Kopter gut verwenden und habe diese mit doppelseitigem Klebeband auf der Deckplatte am Heck aufgeklebt.
Der Videotransmitter Skyzone TS5831S findet seinen Platz über dem X4R Empfänger. Mehr passt da nun wirklich nicht mehr rein.
Die FPV Kamera PZ0420M passt perfekt in eine der dem Rahmen beigelegten Kamerahalterungen. Alle FPV Komponenten miteinander verlötet und dann die Kabel zwischen Kamera und CC3D verstaut. Auch hier ist kein Platz mehr, da auch der BEC in diesem Bereich liegt.
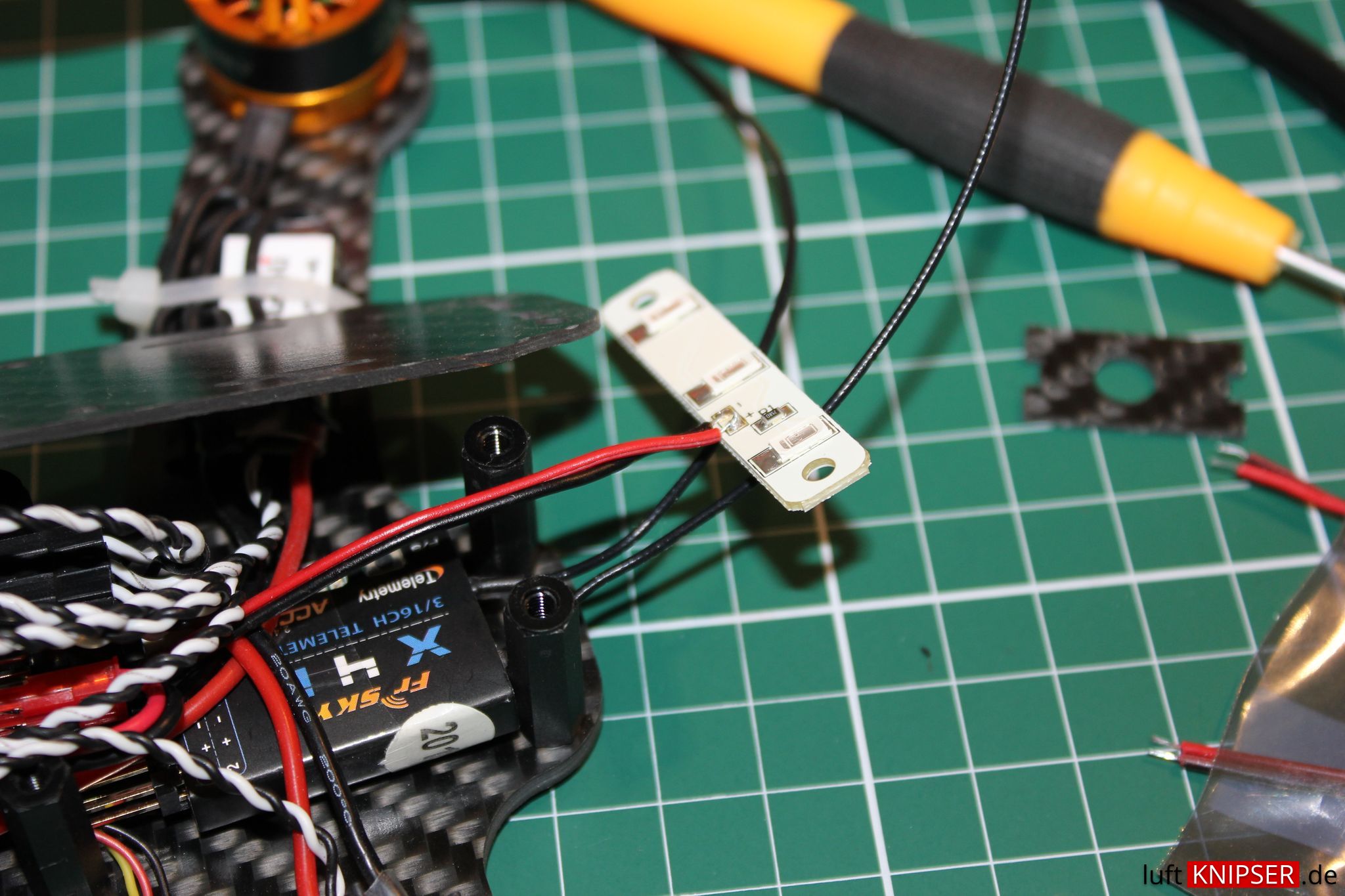
Als Rückleuchte hab ich die für mich bewährten LED Boards mit drei sehr hellen roten LED´s auch mit beidseitigem Klebband am Heck befestigt. Hält prima.





Testflug und Fazit zum CP210 FPV Racer
Das Abfluggewicht des CP210 ist mit einem SLS 3S 1300mAh 40C Lipo 440g. Sicherlich kein Leichtgewicht, doch mit dem ersten Testflug bin ich sehr zufrieden. Lässt sich super steuern und hat ordentlich Kraft. Da es in der Grundeinstellung schon fast perfekt ist, lasse ich bis auf weiteres Openpilot als Firmware auf dem Flightcontroller drauf und werde noch etwas mit den Flugmodes experimentieren.
Der Aufbau war aufgrund der kleinen Bauweise etwas fummelig. Während der Bauzeit habe ich einige Male gesagt, „die nächsten Kopter werden wieder größer“. Jetzt wo der CP210 FPV Racer fertig ist, hat sich das schon wieder etwas relativiert. Mal sehen, vielleicht gibt es bald noch ein kleineren Kopter.
6 Kommentare zu “CP210FPV – Carbon FPV Racer der 210er Klasse”
Hallo Matthias, da hast du ein sehr schönes Teil gebaut. Super eng geht’s da zu. Aber du hast alles perfekt unter gebracht. Bin auf das Teil gespannt
Hallo,
Kannst du mir bitte schreiben wie du die Runcam mit dem Sender verbunden hast.
Habe schon zwei eachine sender gekillt. Bei denen liegt nur 3.6v an aber die sony braucht mindestens 5v.
Vielleicht kannst du mir schreiben wie welches Kabel verbunden werden muss.
Gruß Christian
Hallo Christian, mit wieviel V gehst du denn an den Eachine Sender? Woher bekommt dieser den Strom? Durch zuwenig Strom geht der Sender nicht kaputt, nur wenn zu viel Volt drauf geht. Auch muss immer eine Antenne aufgesteckt sein, sonst grillt es des Sender.
Von der Runcam kommen drei Kabel, Schwarz, rot und gelb. Gelb ist das Video-Signal [Anschluss V], Schwarz ist – [Anschluss 5V Out-] und Rot ist die Stromversorgung (i.d.r 5-17V) [Anschluss 5V Out+]. Welchen Eachine Sender hast du?
[…] war an der Zeit den Hangar um einen weiteren FPV Racer zu erweitern. Da ich von dem CP210 FPV Racer begeistert bin, ist nun ein weiterer Racer der 210er Klasse dazu […]
nachdem ich mit robocat angefangen habe wurden sie auch bei mir immer kleiner und schneller. was mich wunderte ist das der kleinste von allem am besten fliegt. wenn ich es doch nur mal schaffen würde FPV zu fliegen, aber die angst fliegt immer mit das ich meinén kleinen verliere.
https://plus.google.com/u/0/photos/photo/101633328988448732659/6469394091339857010
Nimm dir mal zwei (aktive) Spotter mit und dann trau dich mal mit FPV. Wenn du die Kontrolle verlierst oder unsicher bist, dann einfach Motoren aus. Kann dir sagen, FPV macht riesig Spaß.