-
Roboterking 210 – Lipo Protector

Meine Team-Kollegen Stefan und Peter von der Kopter Crew haben für den Roboterking 210 FPV Racer einen Lipo-Schutz entwickelt. Denn bei einem Crash mit dem Racer kann es vorkommen, dass der Lipo im Bauch des Roboterking 210 mit voller Wucht gegen den eingebauten Videosender (VTX) schlägt.
-
Nighthawk 250 geht in den Ruhestand
Irgendwann kommt der Tag, wo man einen FPV-Racer einmottet oder demontiert. Bei meinem allersten Racer, dem Nighthawk 250 ist es jetzt so weit. Technisch ist er noch TOP in Schuss, auch wenn er schon manche heftige Crashs hat einstecken dürfen. Doch mit der Leistung und Performance meiner neueren FPV-Racer kommt er nicht mehr mit.
-
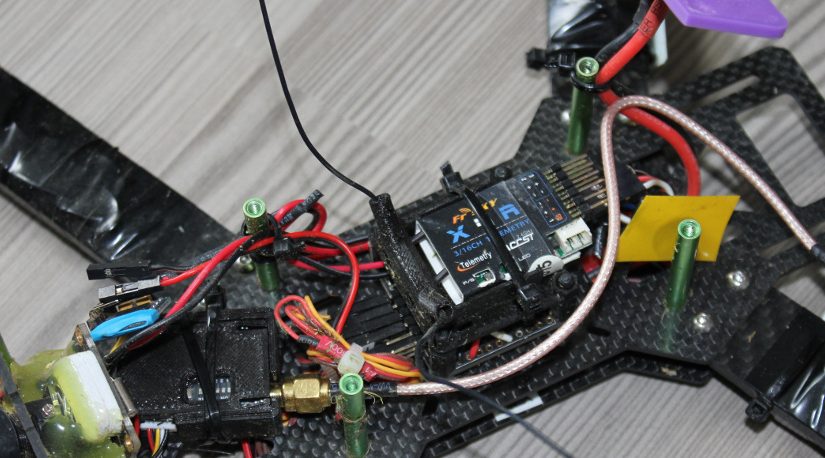
Der H210 – Ein neuer FPV Racer ist im Hangar

Es war an der Zeit den Hangar um einen weiteren FPV Racer zu erweitern. Da ich von dem CP210 FPV Racer begeistert bin, ist nun ein weiterer Racer der 210er Klasse dazu gekommen. Der Rahmen ist ein QAV210 Clone. Die Arme und Bodenplatte sind aus einem Stück 3mm Carbon. Als PDB (Power Distribution Board) kommt […]
-
Ein Buzzer für die Naze32

FPV Fliegen auf der Wiese bedeutet oft auch die Suche nach dem FPV-Racer in hohem Gras. Je nach Areal kann dies eine Weile dauern bis man den Kopter findet, wenn man ihn überhaupt findet. Mit einem Beeper kann die Suche verkürzt werden. Per Schalter an der Fernsteuerung kann man diesen im Bedarfsfall An- und Ausschalten. […]
-
RoboterKing 210 FPV Racer – Einstellungen und Erstflug

Im Auslieferungszustand meines RoboterKing 210 FPV Racer ist auf dem Mini Naze32 Flightcontroller die Cleanflight-Firmware 1.9.0 (Stand 31. Mai 2015) vorinstalliert. Da gibt es schon neuere Versionen, daher habe die momentan aktuelle stabile Version 1.12.1 von Cleanflight geflashed. Nach dem Reboot des Naze32 habe ich mich an die Konfiguration gemacht. Grundsätzlich nutze ich zunächst immer […]