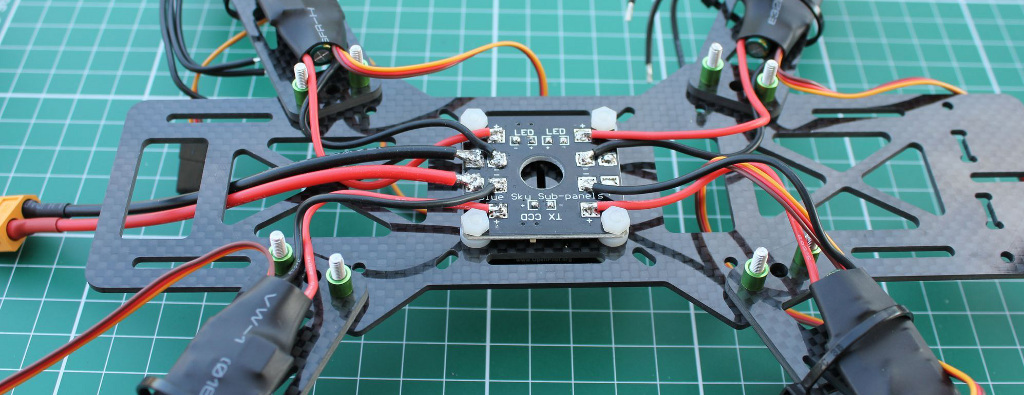
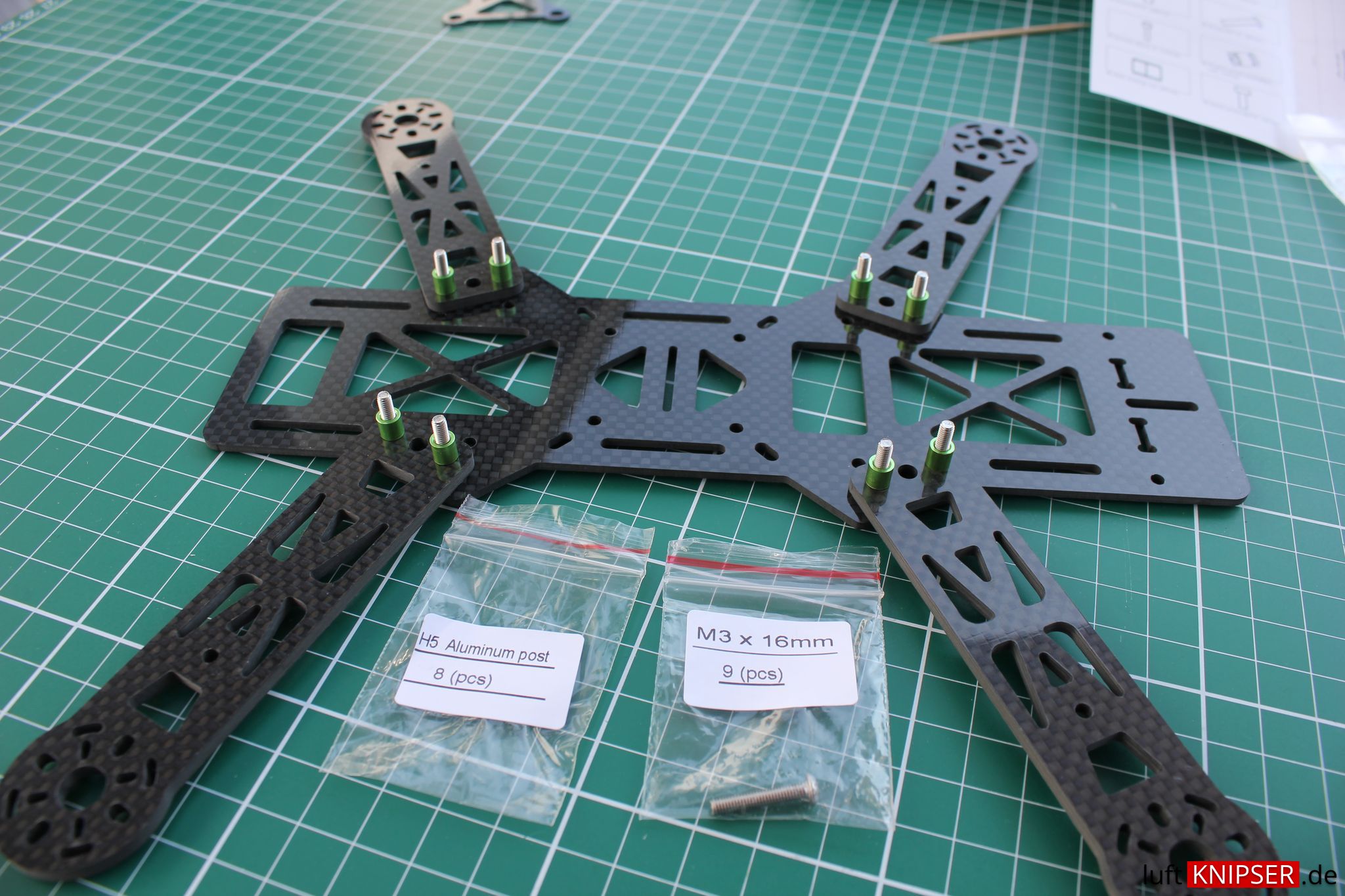
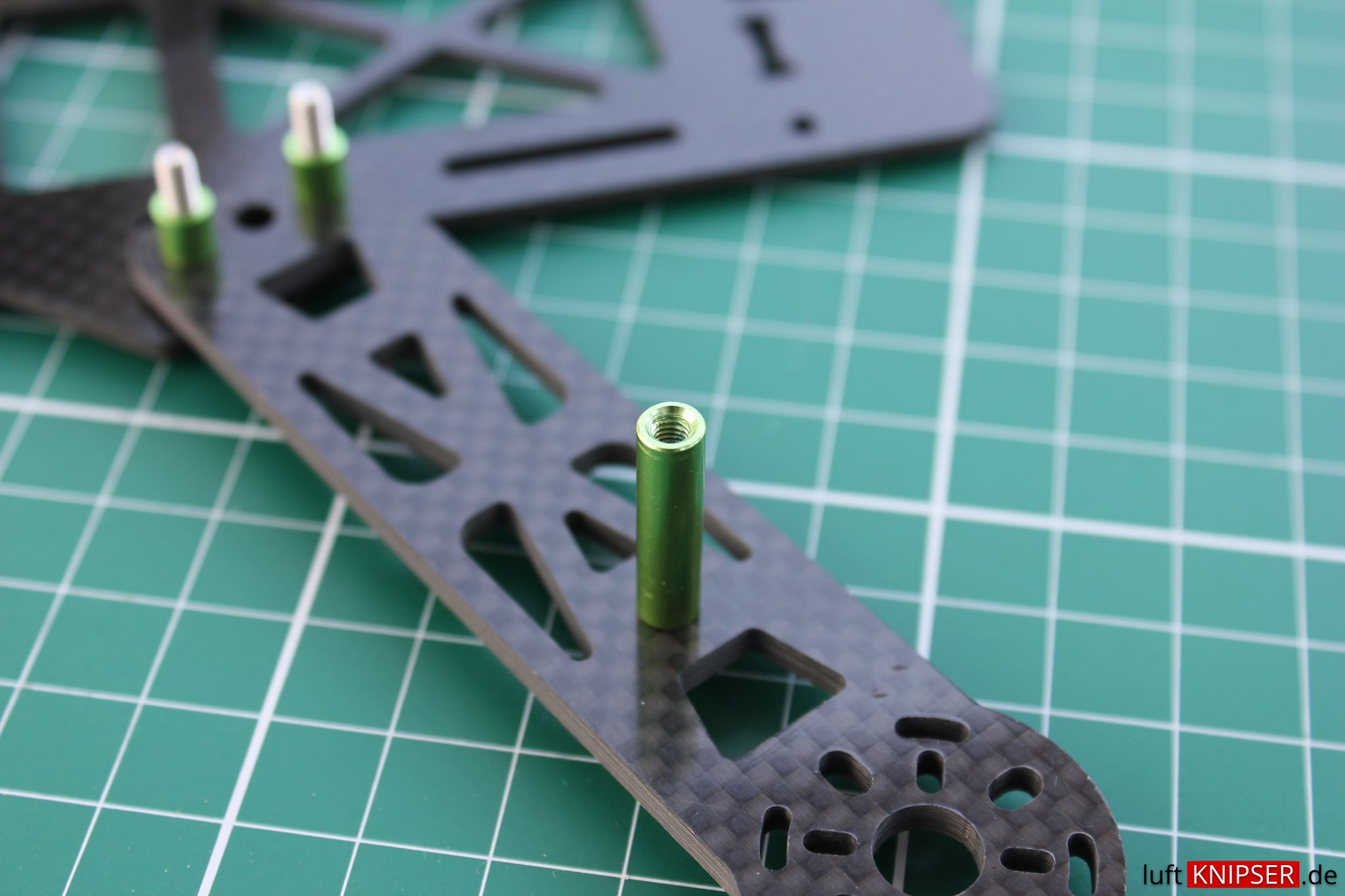
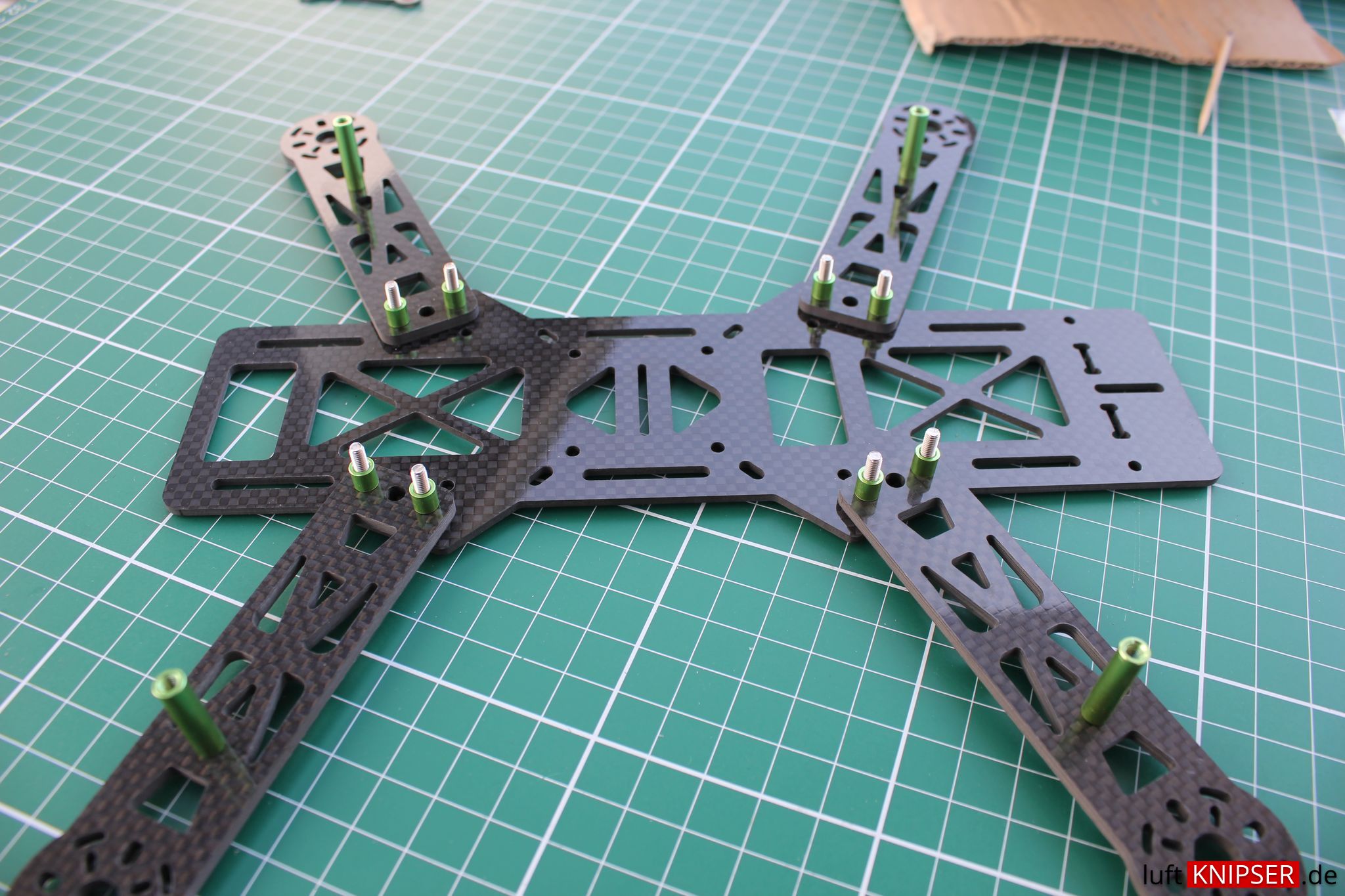
Als erstes habe ich die Arme für die Motoren mit der Grundplatte (Frame Center Board) verschraubt. Dafür verwendet man die beiliegenden M3x16mm Schrauben und die H5 Aluminium Spacer.
Tipp vorab: Da der Rahmen später im Flug Vibrationen ausgesetzt ist, empiehlt es sich alle Schaubvebindungen aus Metall mit Schraubensicherlugslack zu versehen. Ich habe dafür „Mittelfest“ (der Blaue) verwendet.

Im nächsten Step habe ich die Landefüße montiert. Hierfür sind die M3x8mm Schrauben und die H20 Aluminium Spacer.

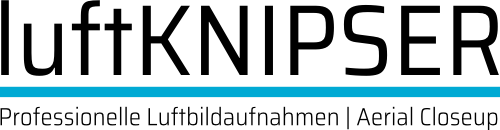
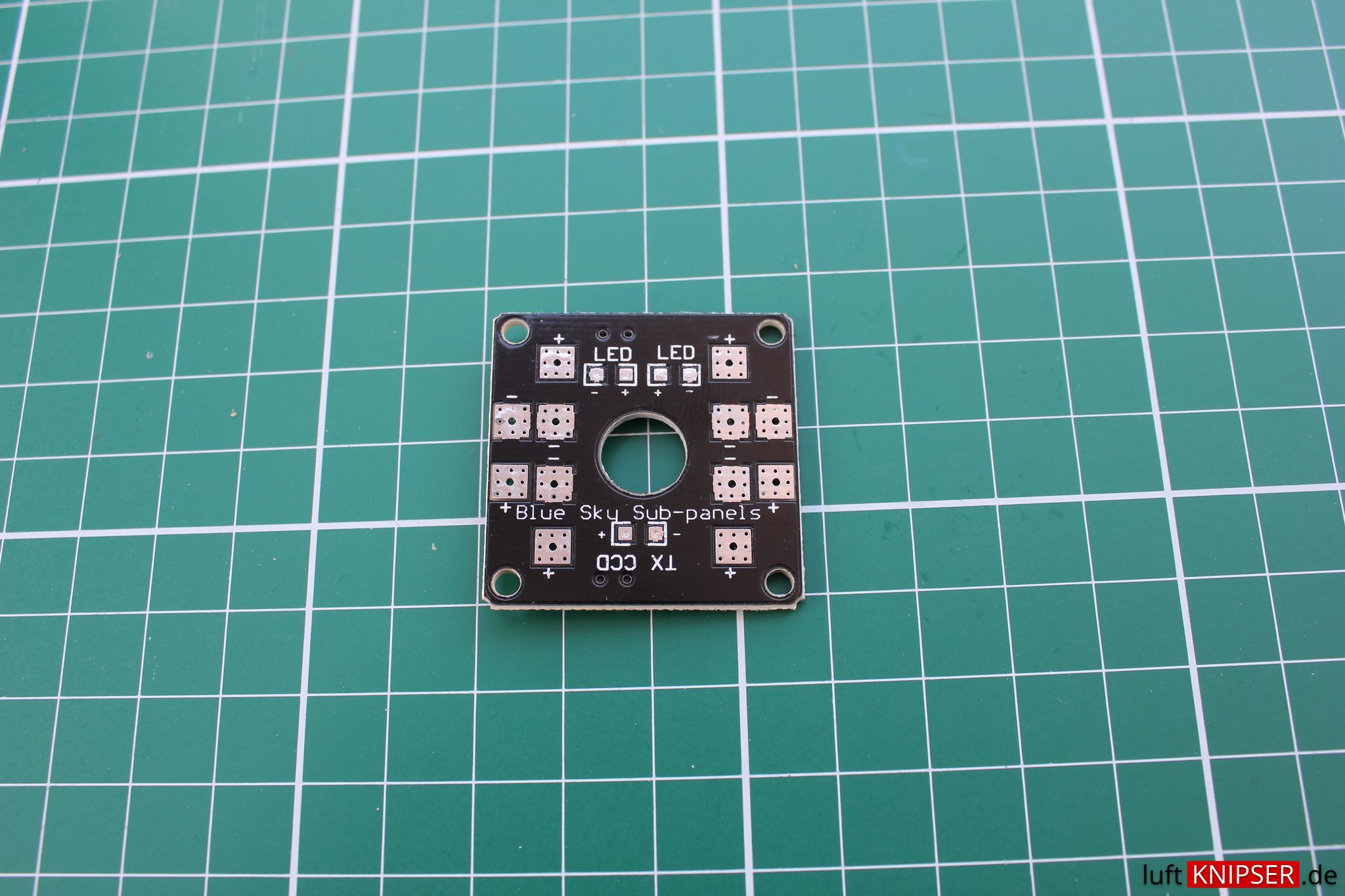
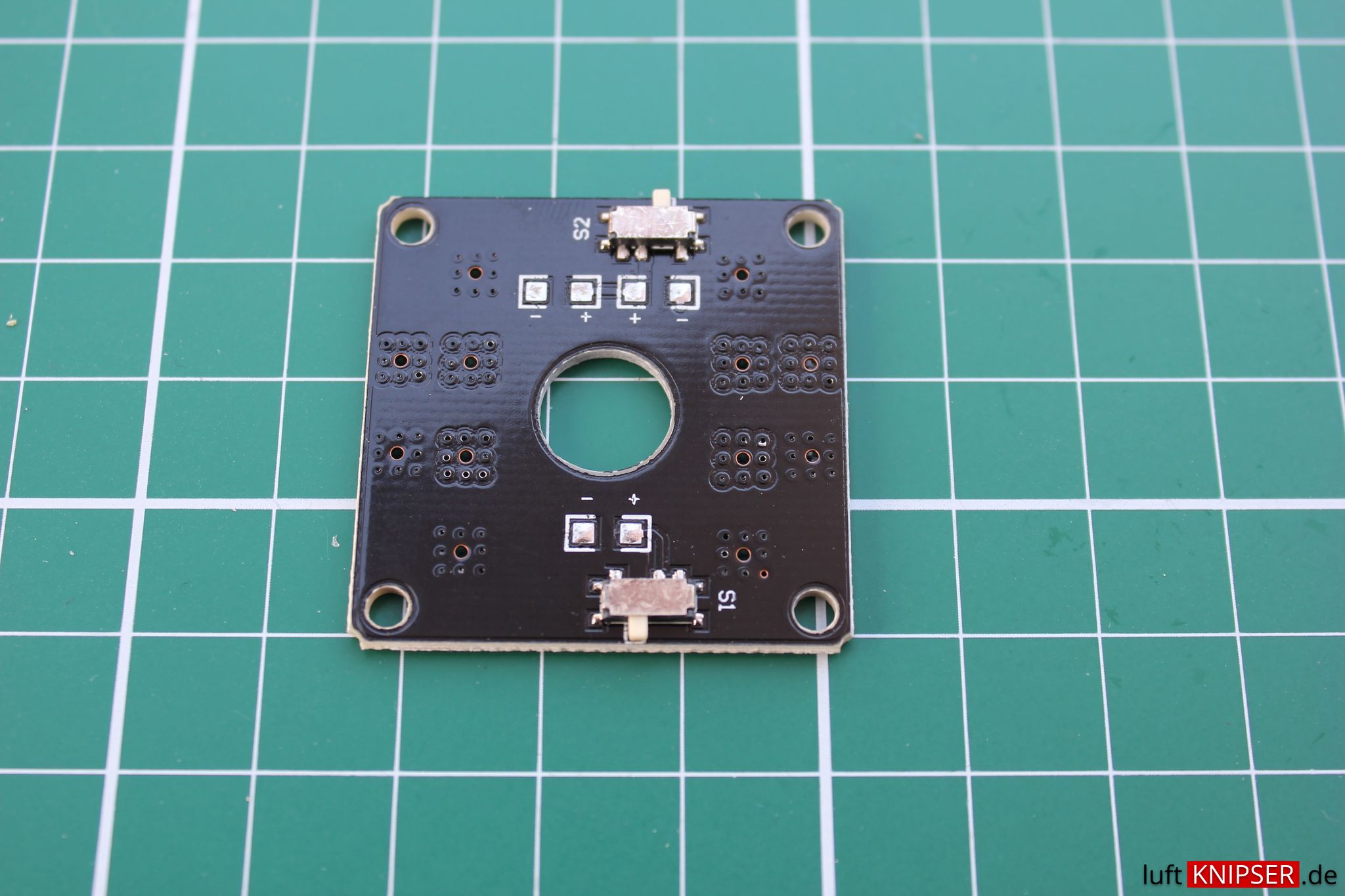
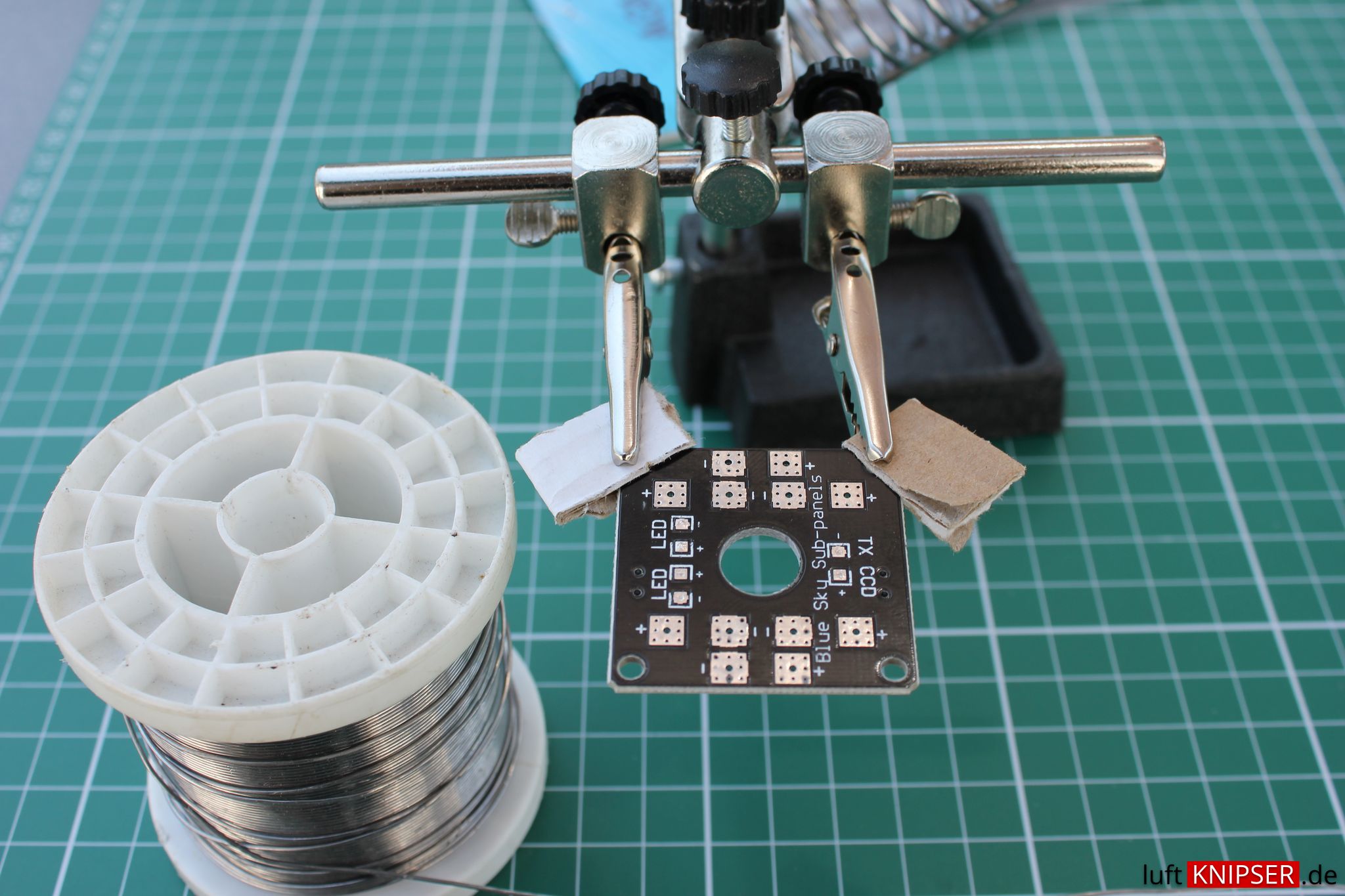
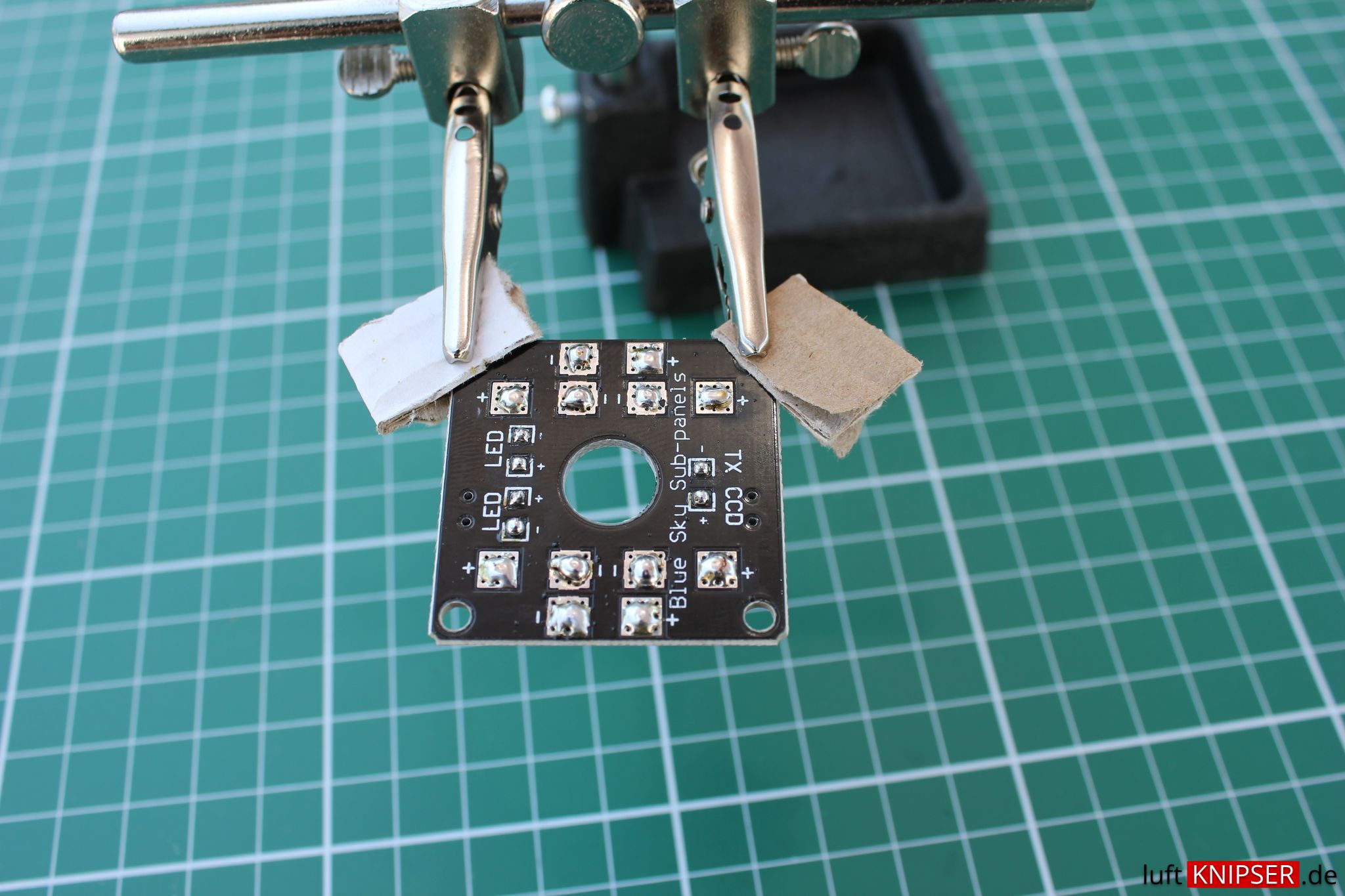
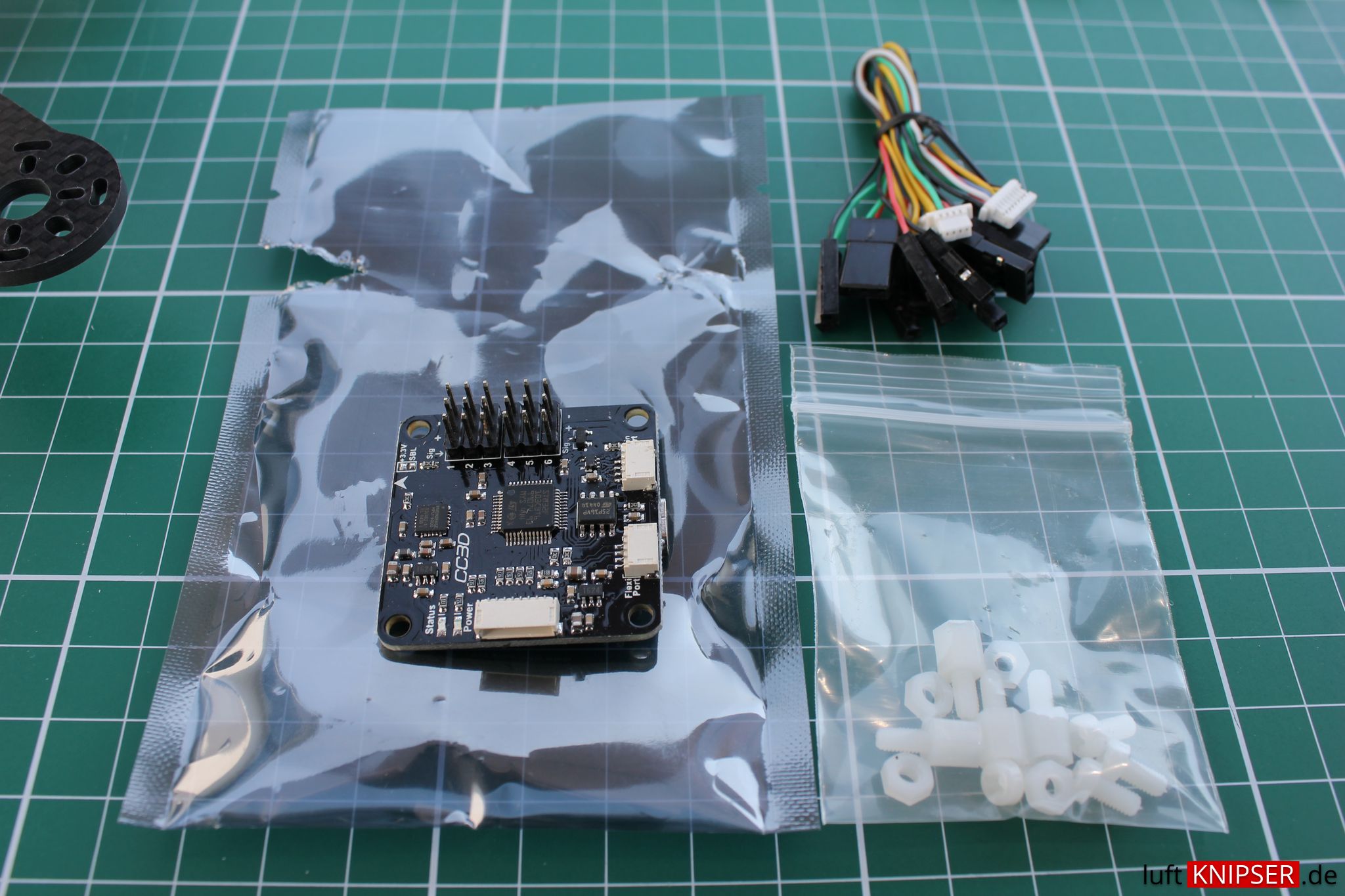
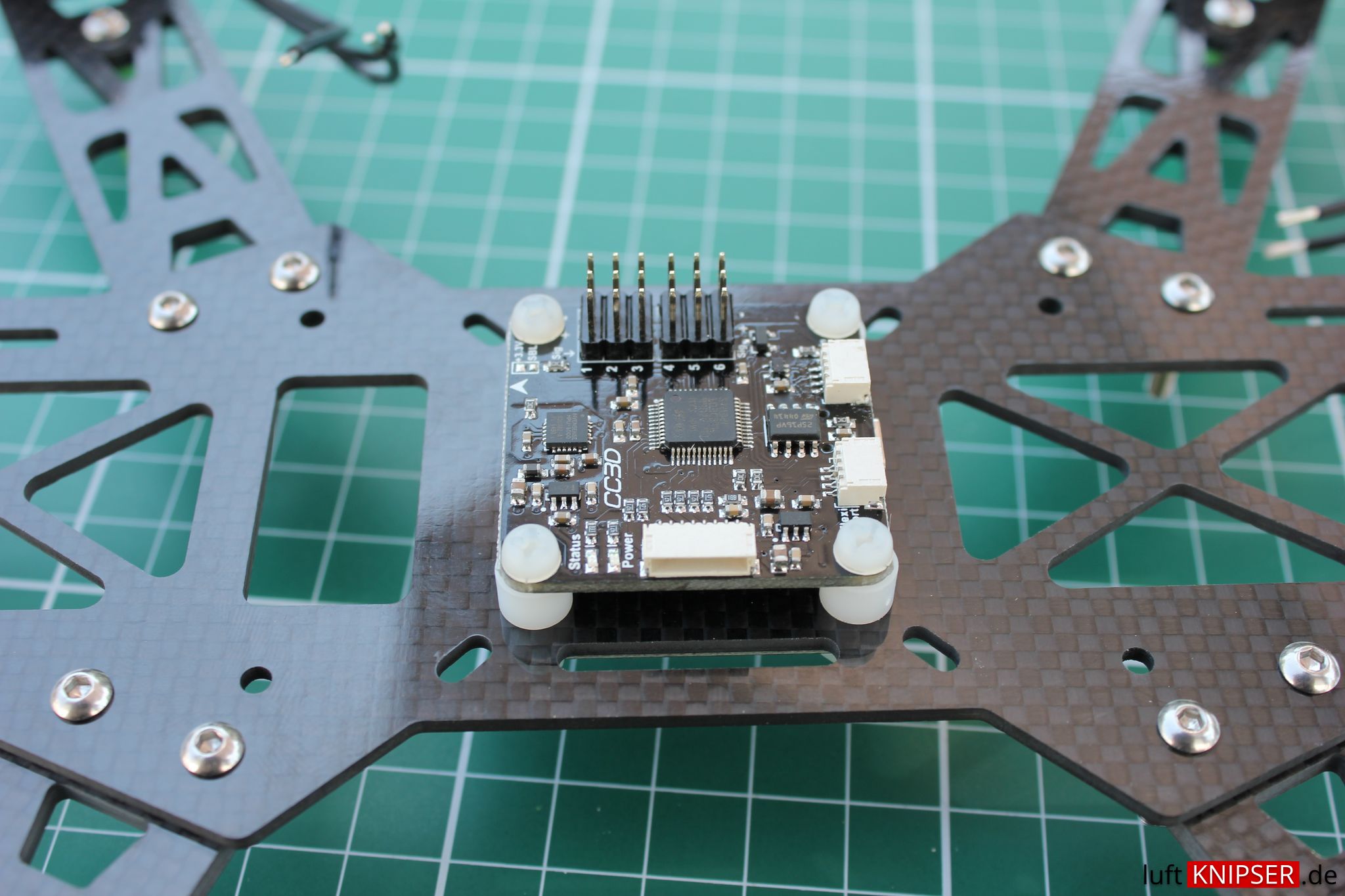
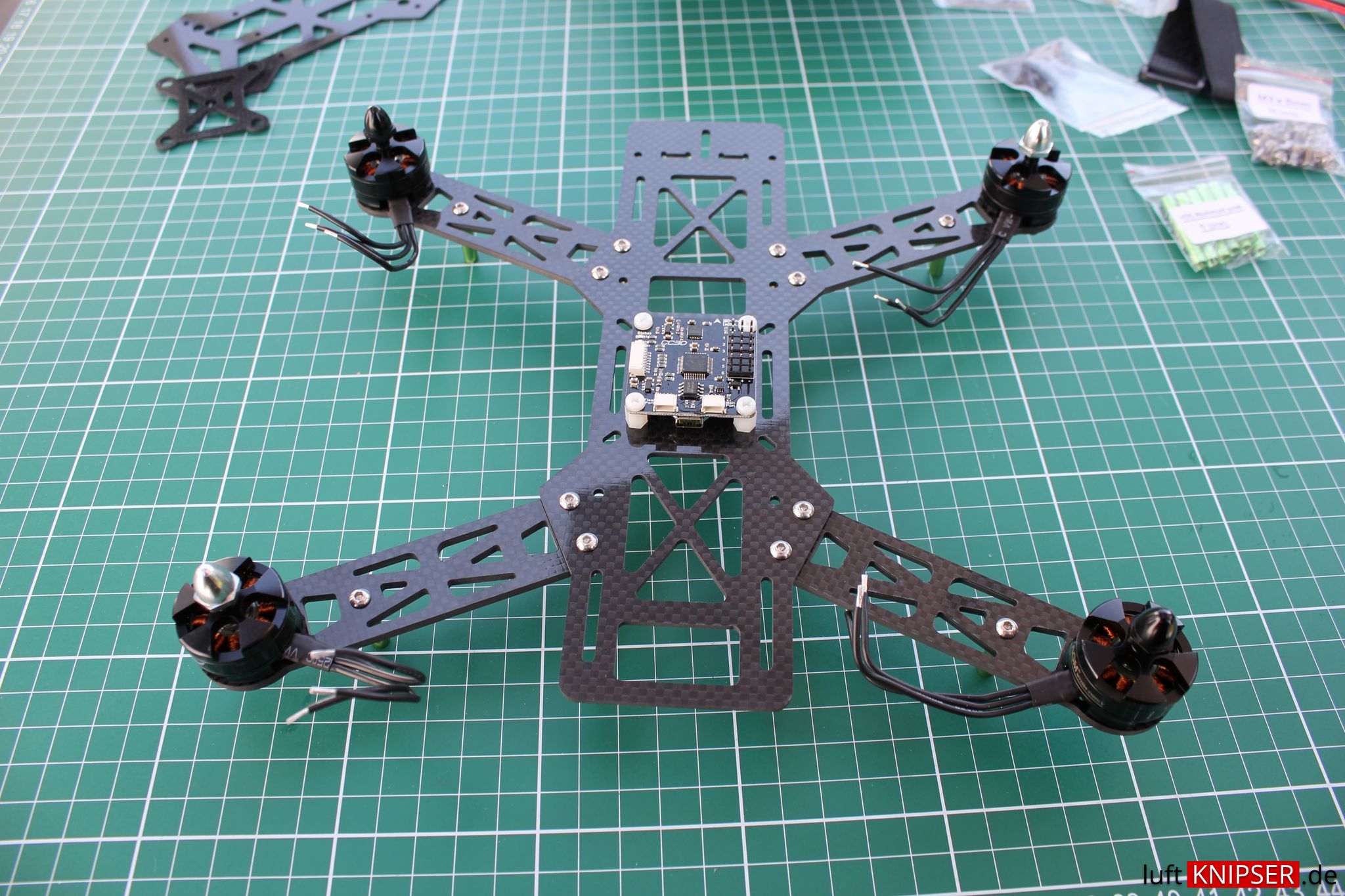
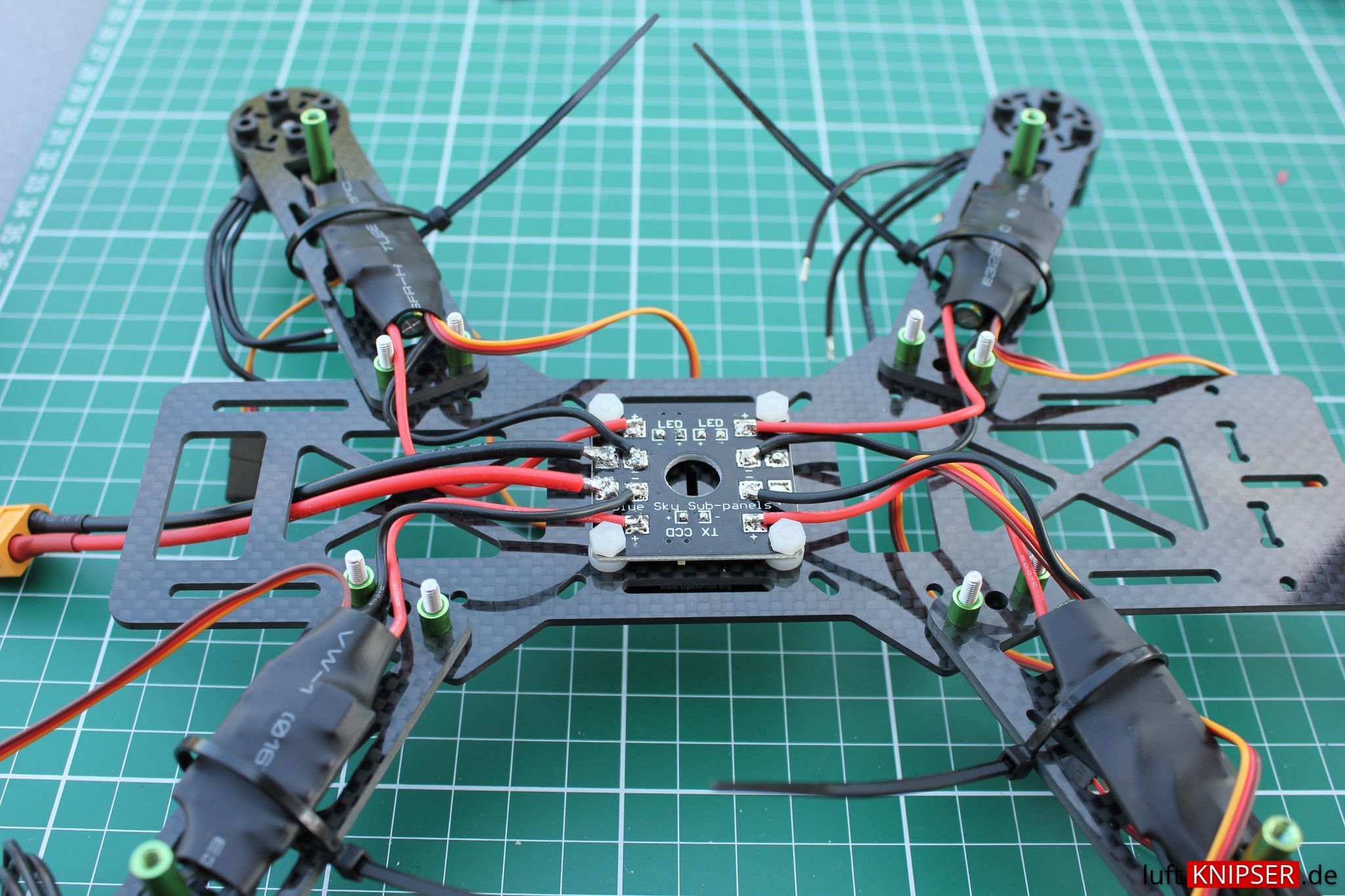
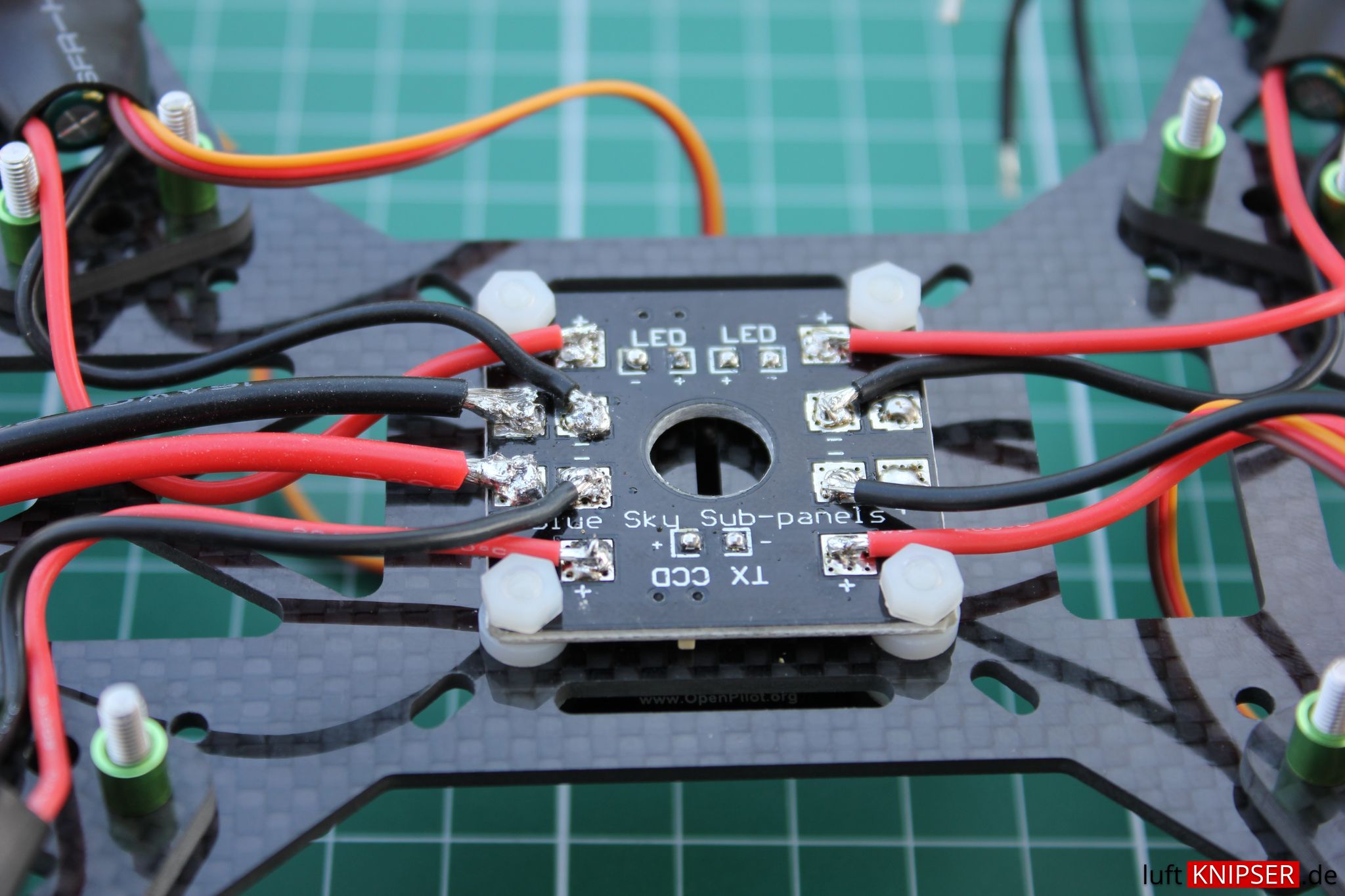
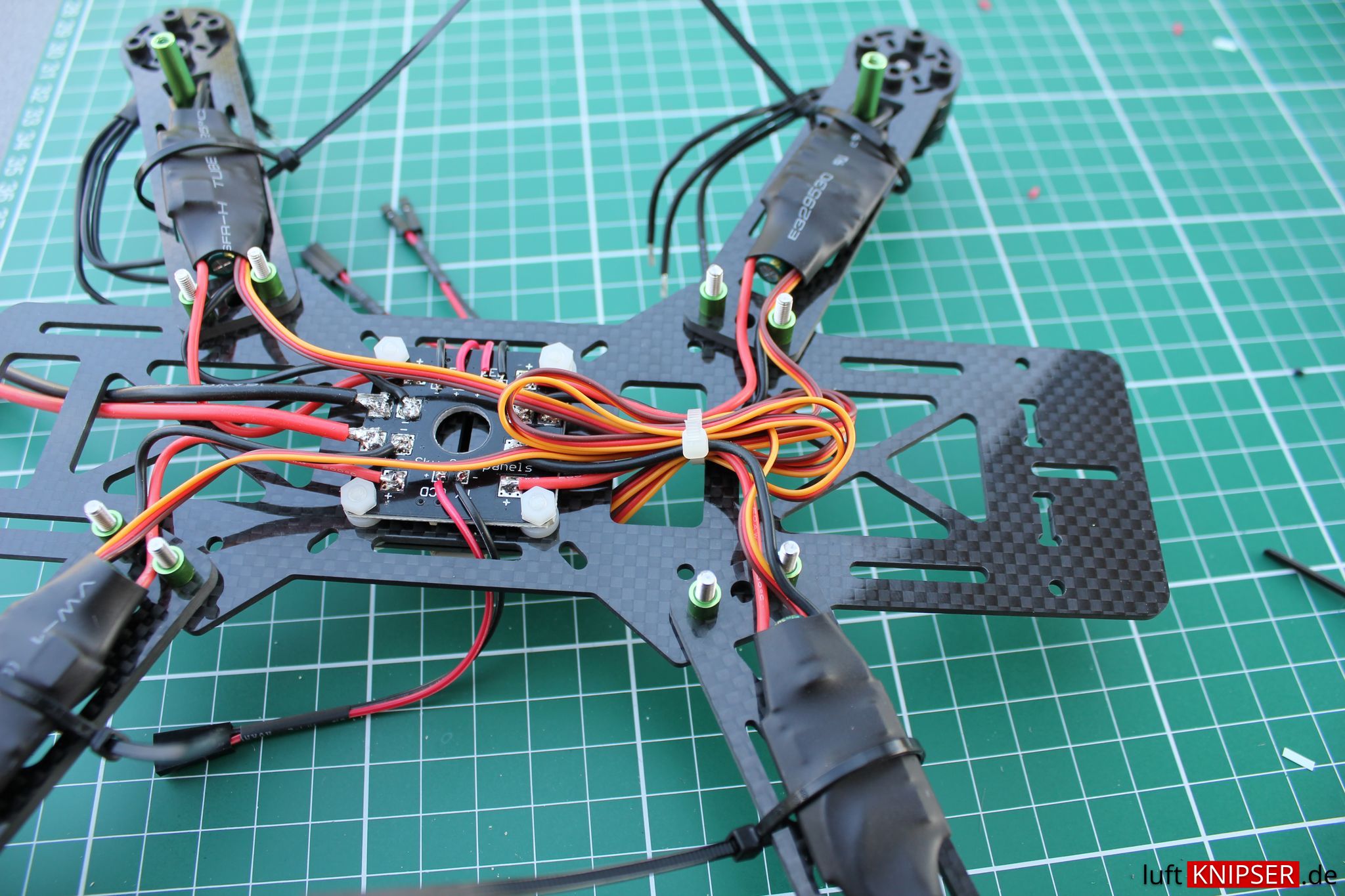
Jetzt kann es an den Einbau des Flight Controllers des Nighthawk 250 gehen. Als Flight Controller kommt der CC3D mit OpenPilot Software zum Einsatz. Zunächst muss aber das Power Distribution Board (PDB) vorbereitet werden. An das PCB werden später alle stromführenden Kabel (ESC, LED, FPV und LiPo Kabel aufgelötet. Hierzu habe ich alle Anschlusspunkte am PDB vorab mit Lötzinn versehen. Auf der Rückseite des PDC sind zwei kleine Schalter (S1 und S2) zu finden. Damit kann man die Stromversorgung z.B. für das FPV System (S1) oder etwaige LEDs (S2) an und ausschalten.
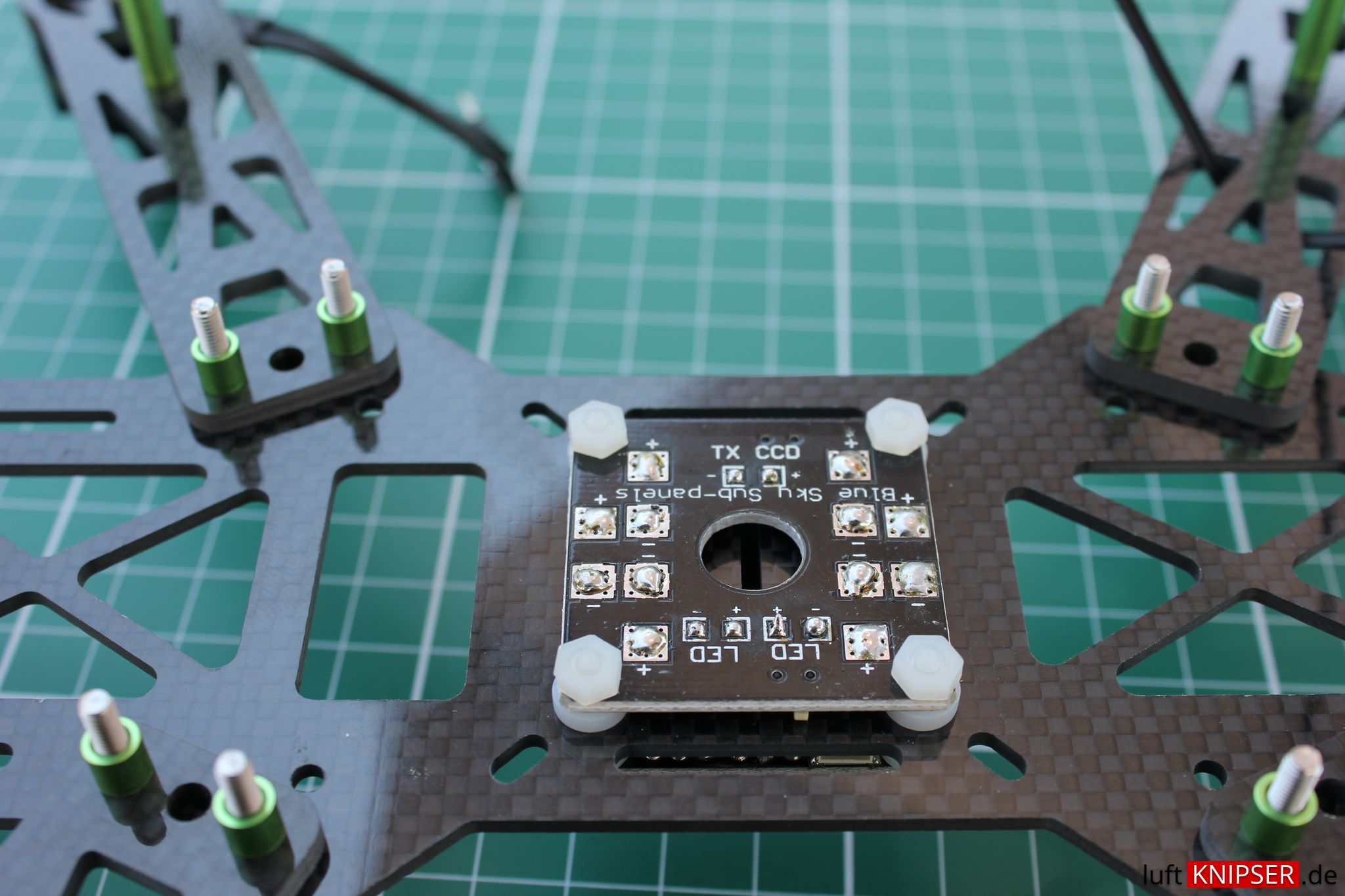
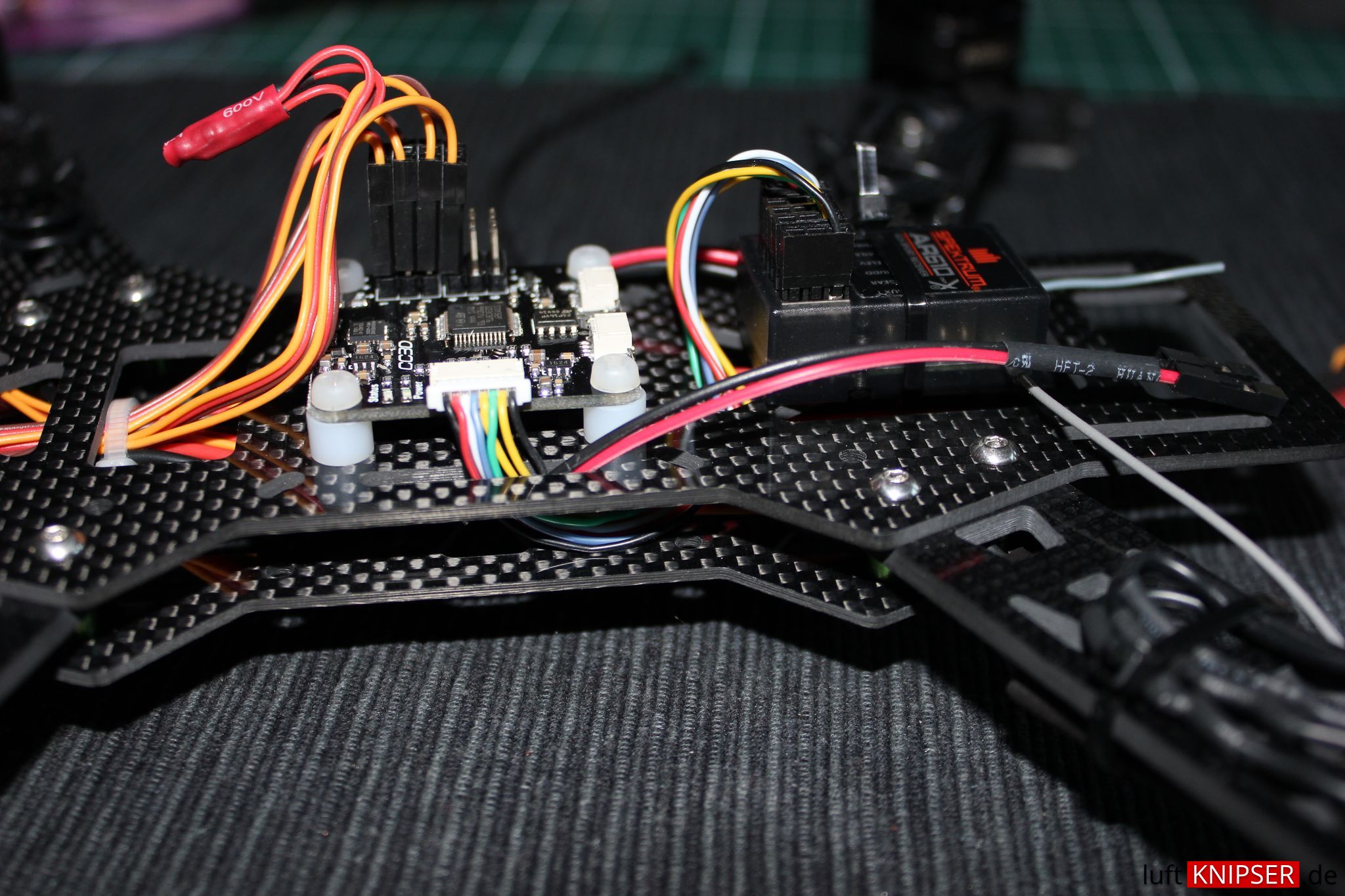
Das PDC kommt auf die Unterseite der Grundplatte des Nighthawk 250. Der Flight Controller CC3D kommt auf die gegenüberliegende Oberseite. Für die Montage nimmt man die Kunststoffschrauben in der Packung mit der Beschriftung CC3D. Die dem CC3D beiliegenden Schrauben nimmt man dafür nicht. Diese kann man nur verwenden wenn man kein PDB verwendet, da die Schrauben kürzer sind.
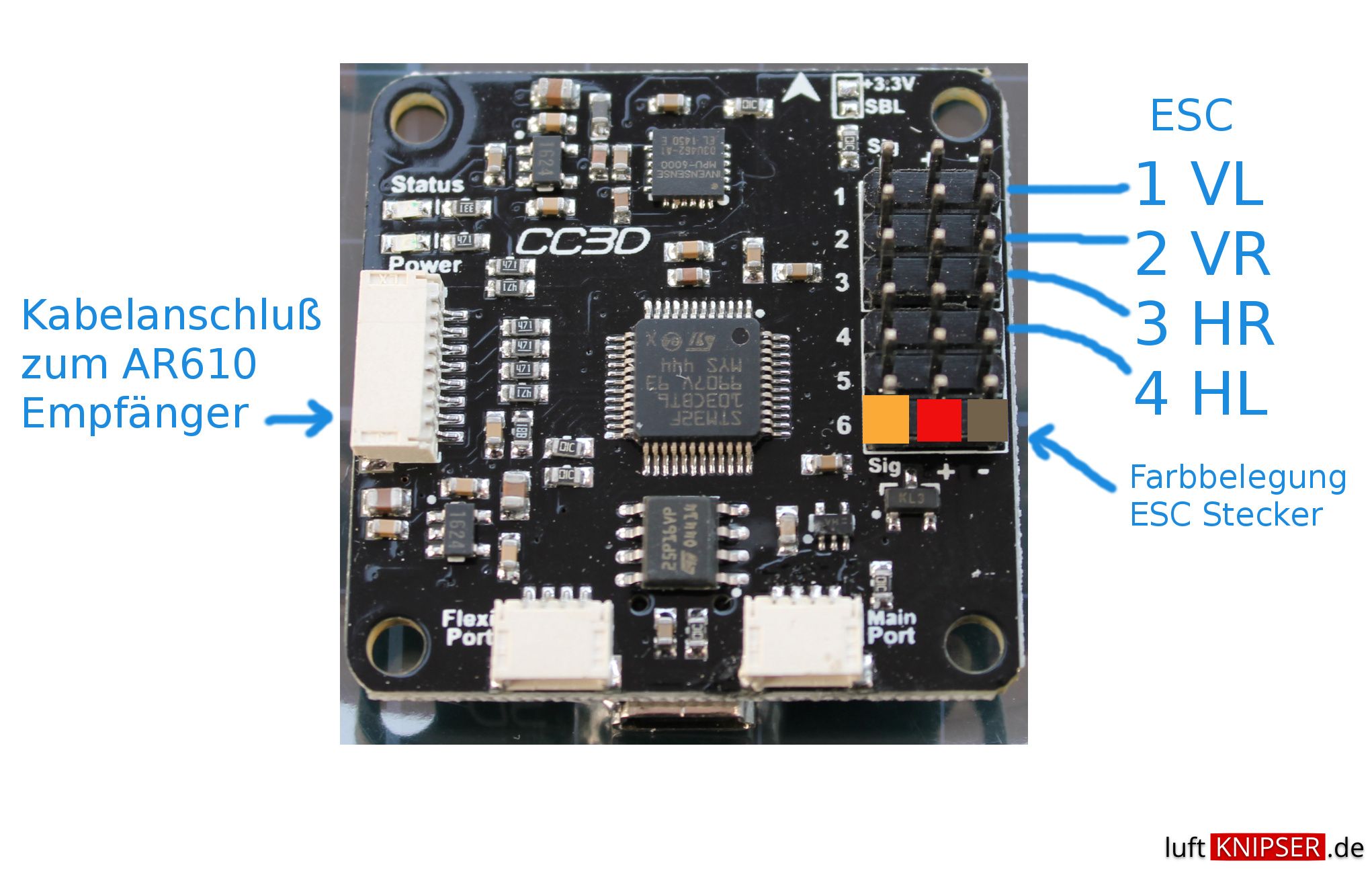
Wichtig bei der Montage des CC3D Flight Controller ist die richtige Ausrichtung auf dem Nighthawk 250. auf de CC3D Platine ist ein kleiner Pfeil aufgedruckt. Diese sollte nach in Flugrichtung nach vorne ausgerichtet werden. Man kann diesen zwar auch anders montieren, doch dann ist die abweichende Einbaurichtung bei der Konfiguration des CC3D anzupassen. Zur Orientierung, Vorne ist dort wo auf der Grundplatte zwei kleine Aussparungen für den Kameraaufnahmehalter zu finden sind.
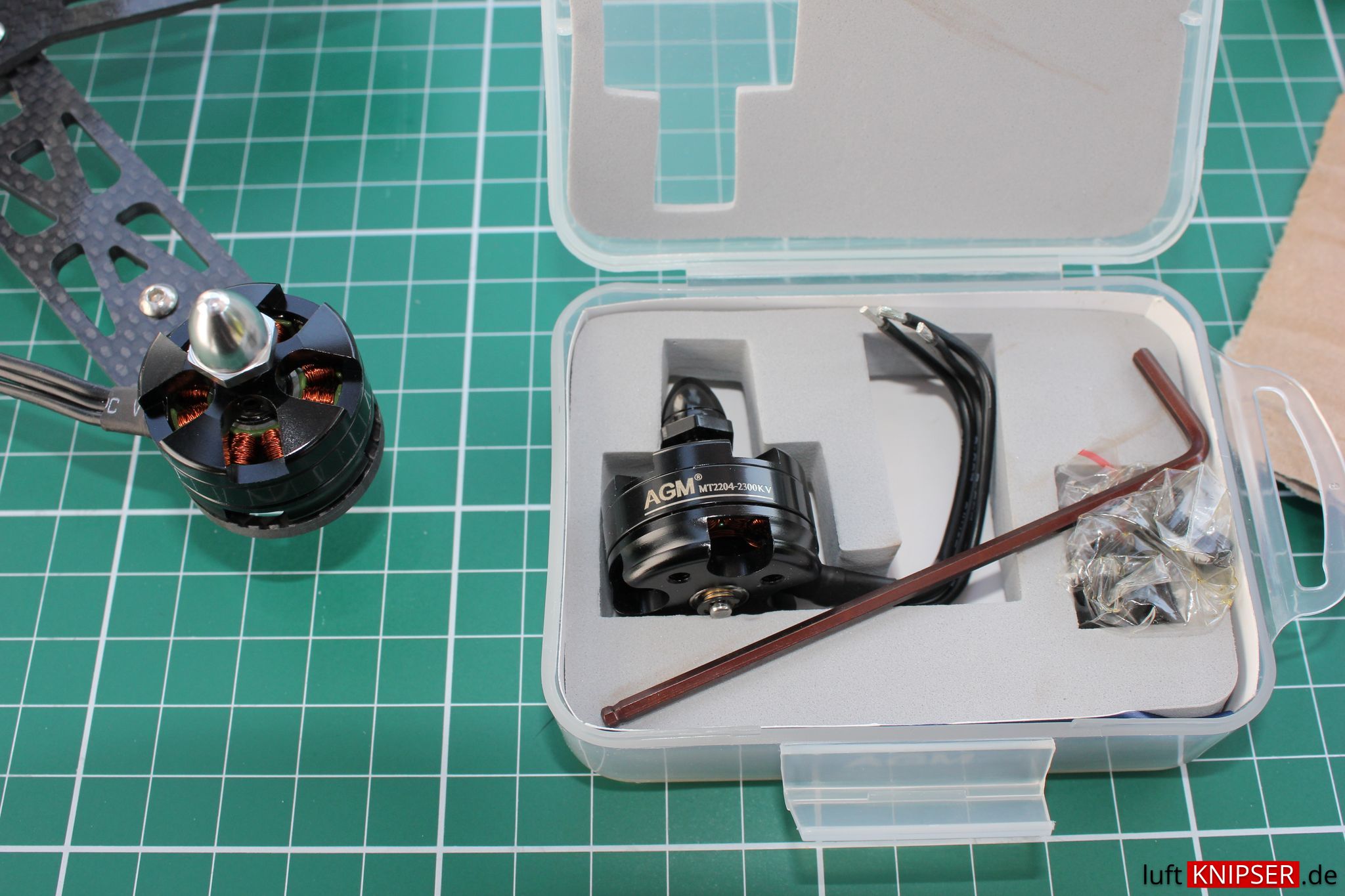
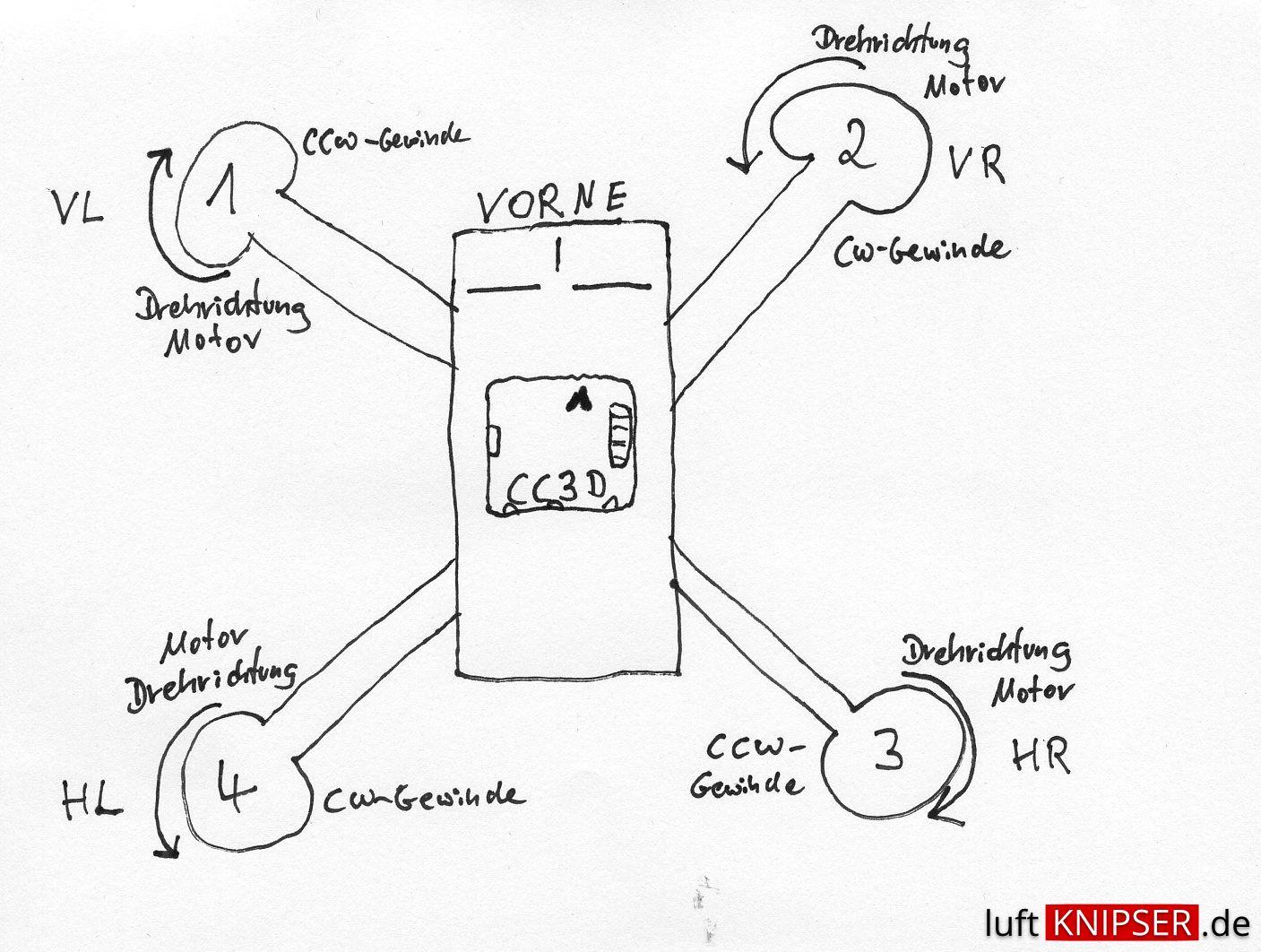
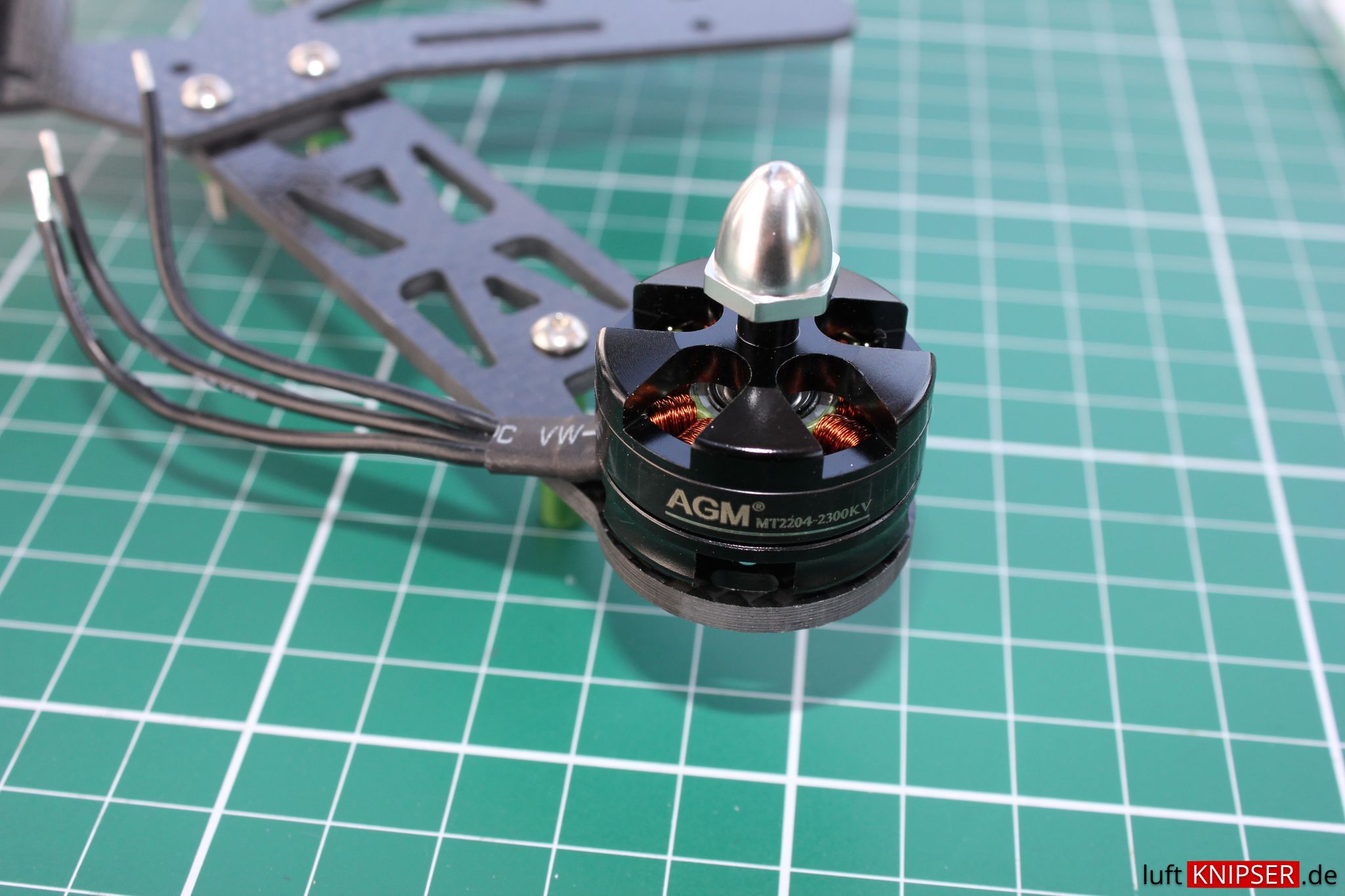
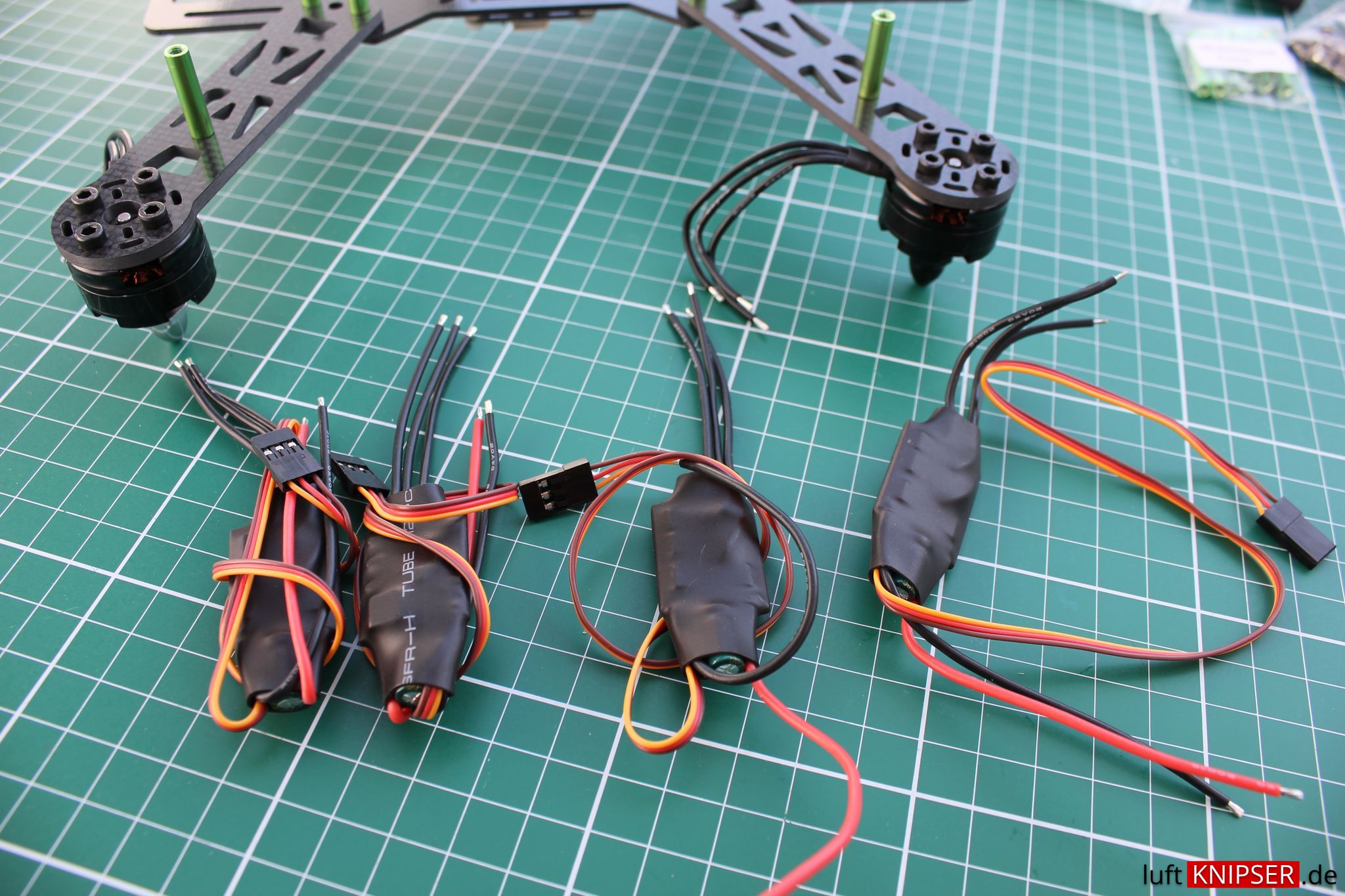
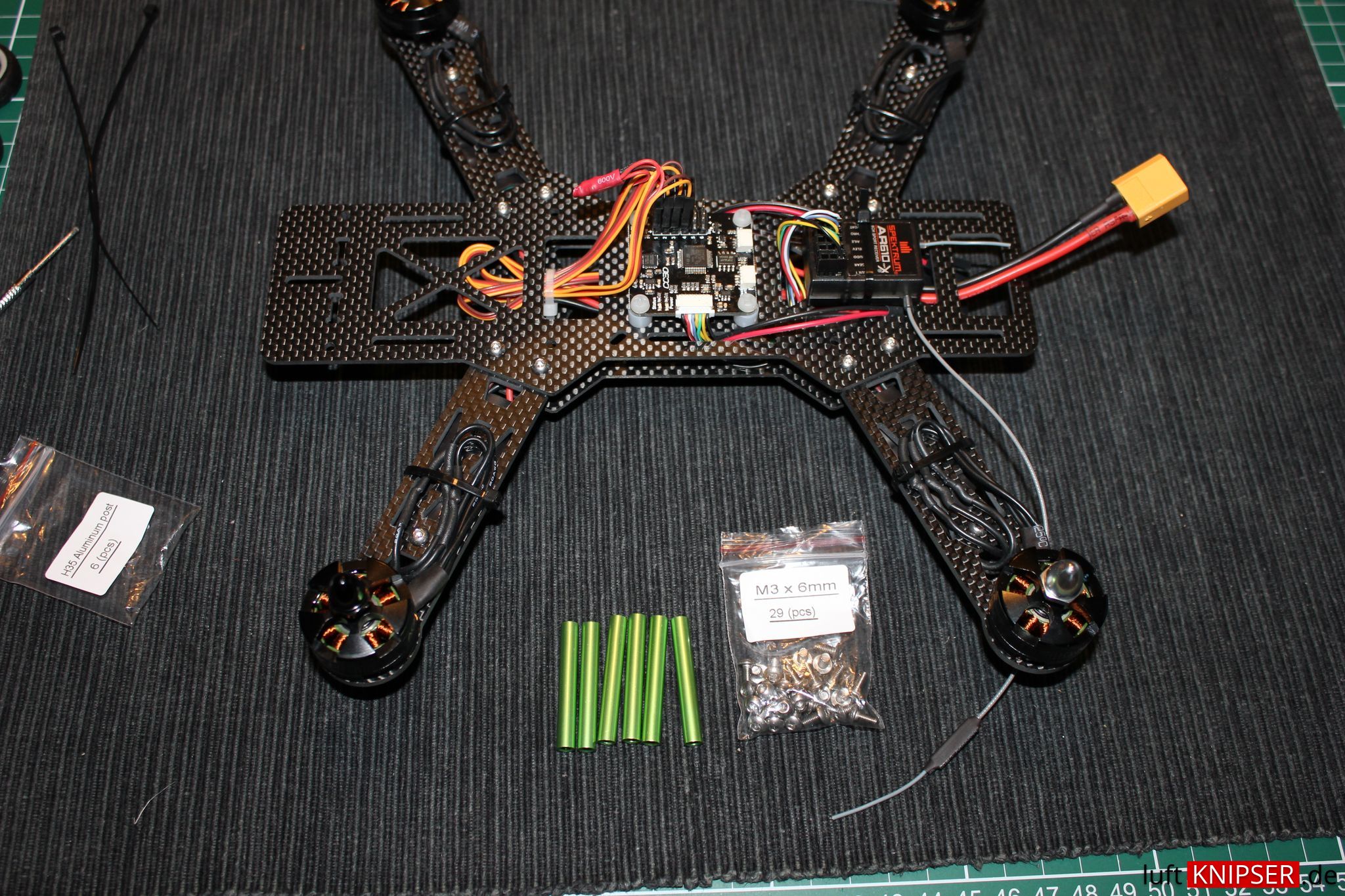
Nun geht es an die Montage der MT2204 2300KV Multicopter Motoren. Alle Motoren haben 3 Kabel. Keines der Kabel ist beschriftet, daher muss man später testen in welcher Reihenfolge die Kabel an die ESC Kabel abgelötet werden müssen. Es gibt aber immer zwei Motoren welche ein Clockwise (CW) Gewinde haben und zwei die ein Counterclockwise (CCW) haben. Die Motoren mit den silbernen Propellermuttern sind mit CW Gewinde. Der Skizze seht ihr die richtige Anordnung der Motoren. Die CW Motoren kommen auf die Position 2 und 4. Die CCW Motoren auf Position 1 und 3. Befestigt werden die MT2204 2300KV Motoren mit jeweils 4 den Motoren beiliegenden Schrauben. Schraubensicherungslack nicht vergessen!


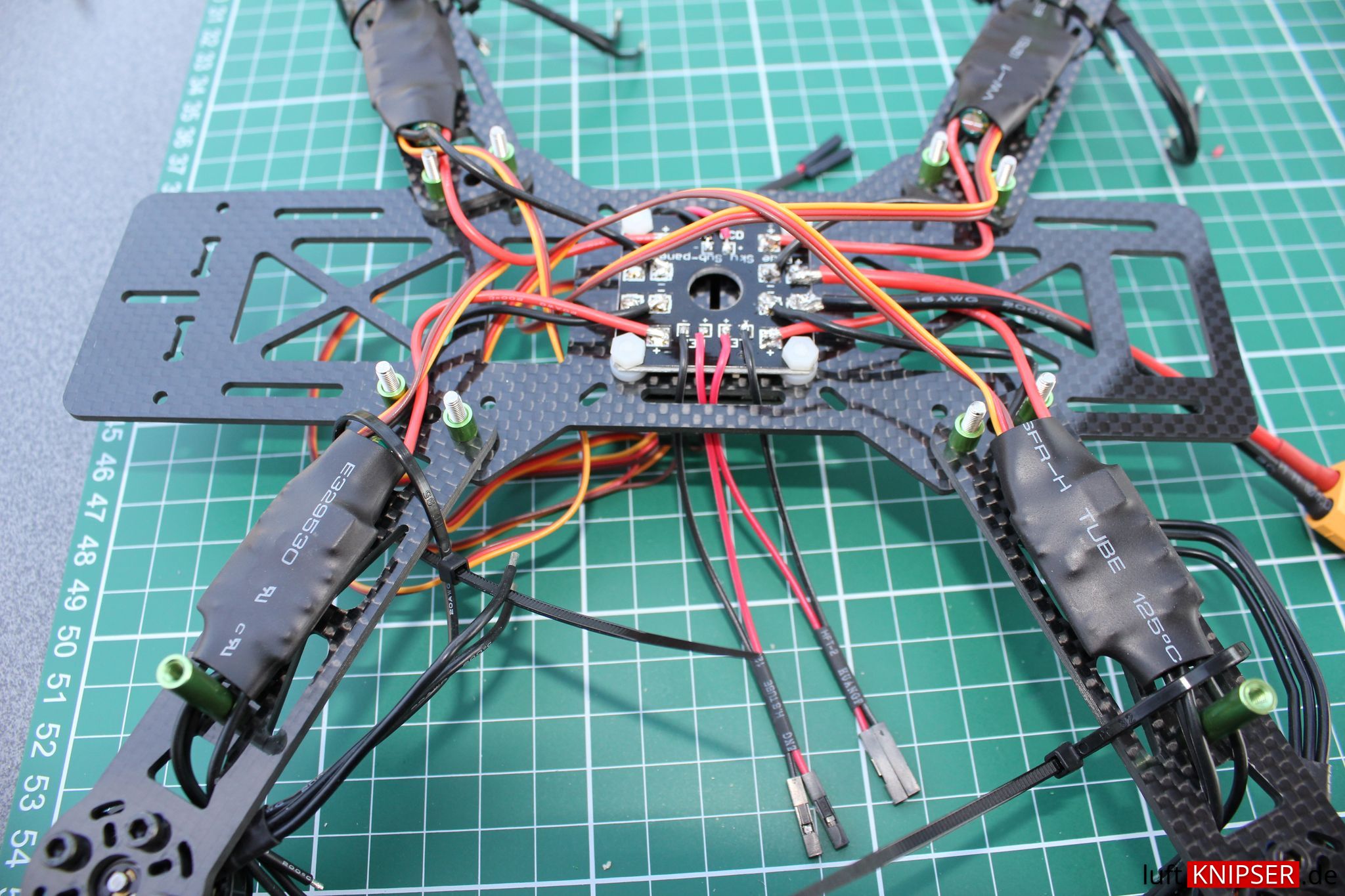
Nun geht es an die Montage des Flugregler, die ESCs. Ich habe mich dafür entschieden die ECS unter die Arme zu befestigen. Manche bauen die ESCs auch zwischen Grundplatte (Frame Center Board) und Unterplatte (Frame Lower Board). Fixiert habe ich die ESC´s mit jeweils einem Kabelbinder.
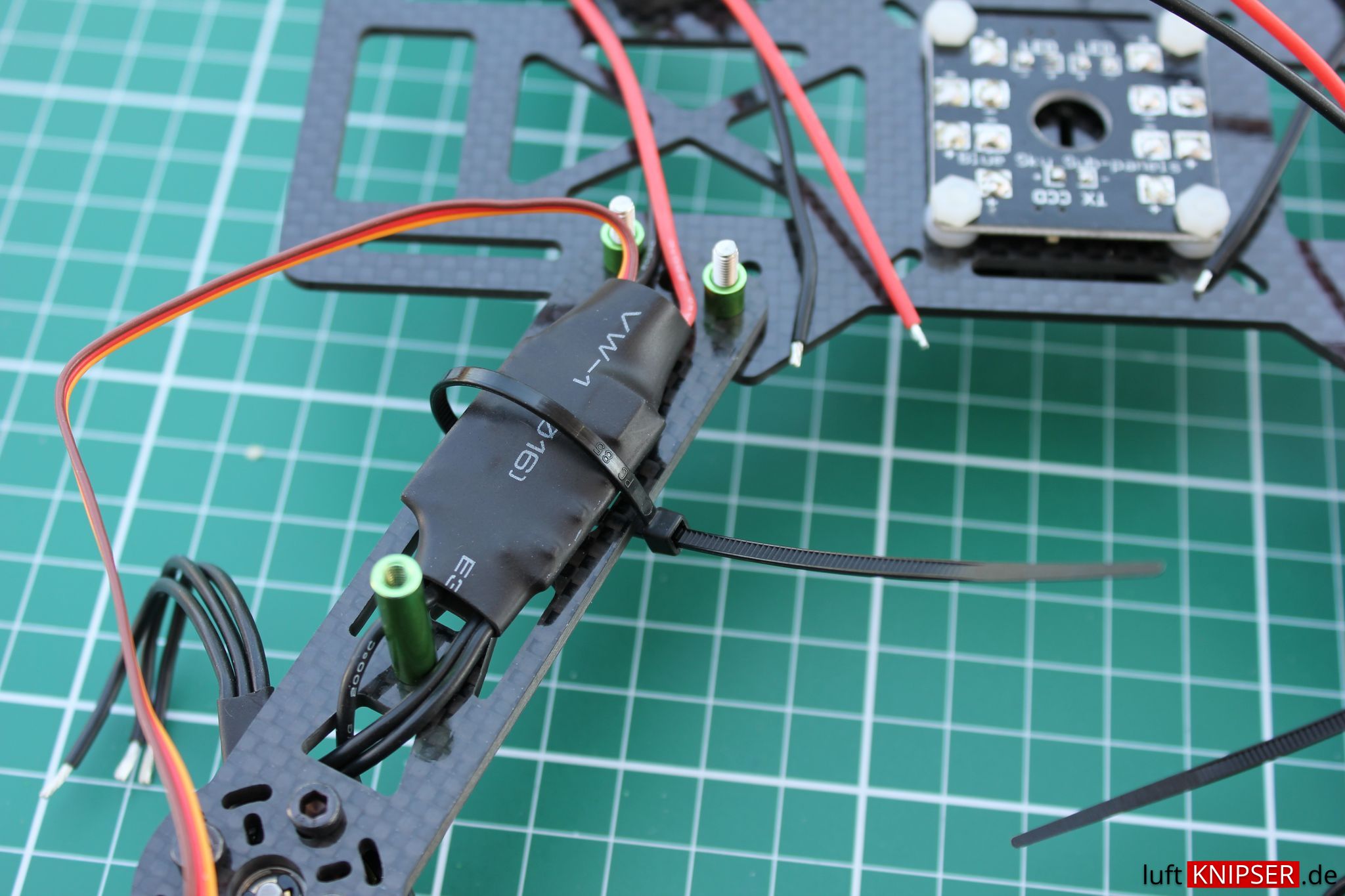
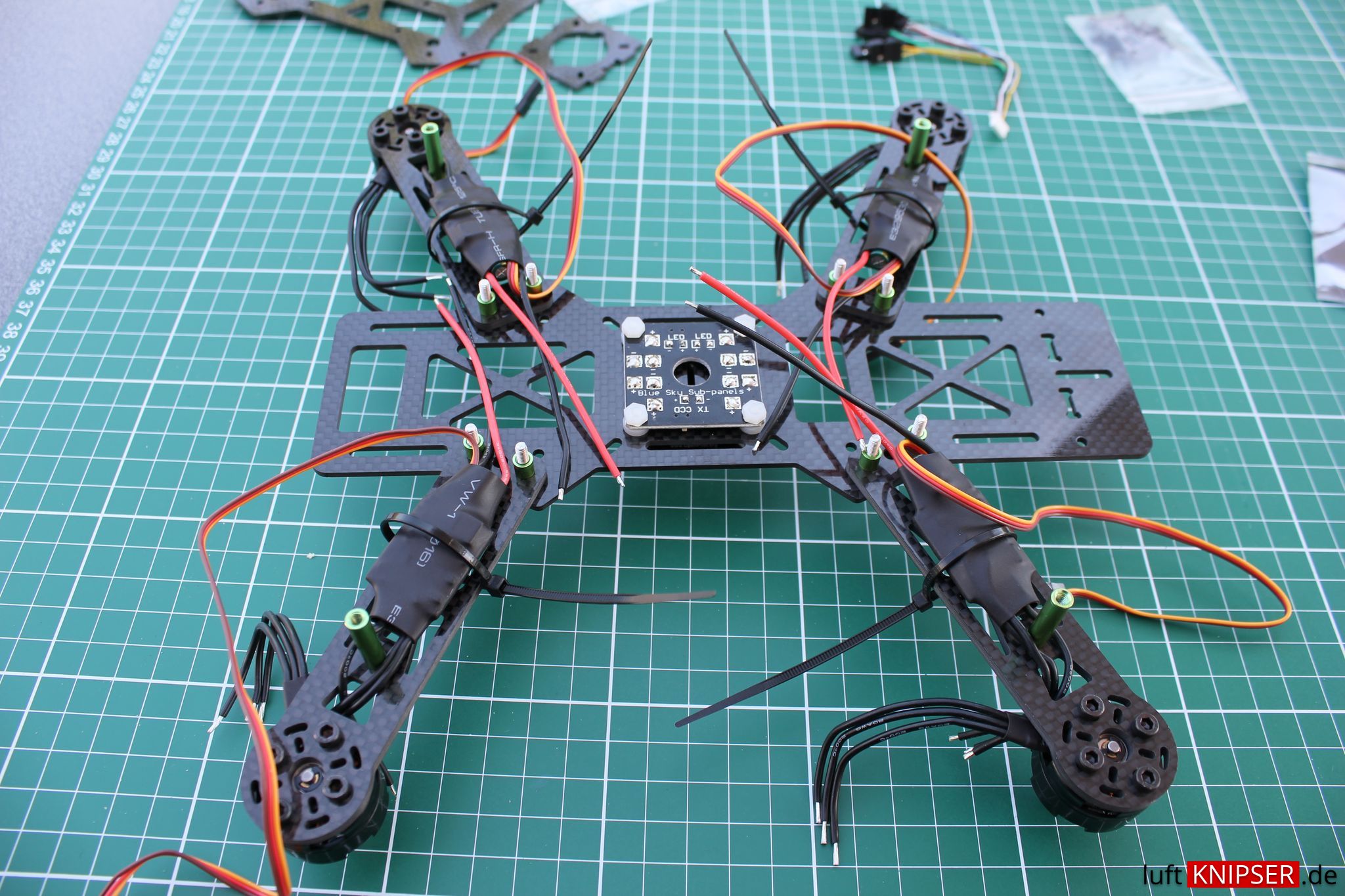
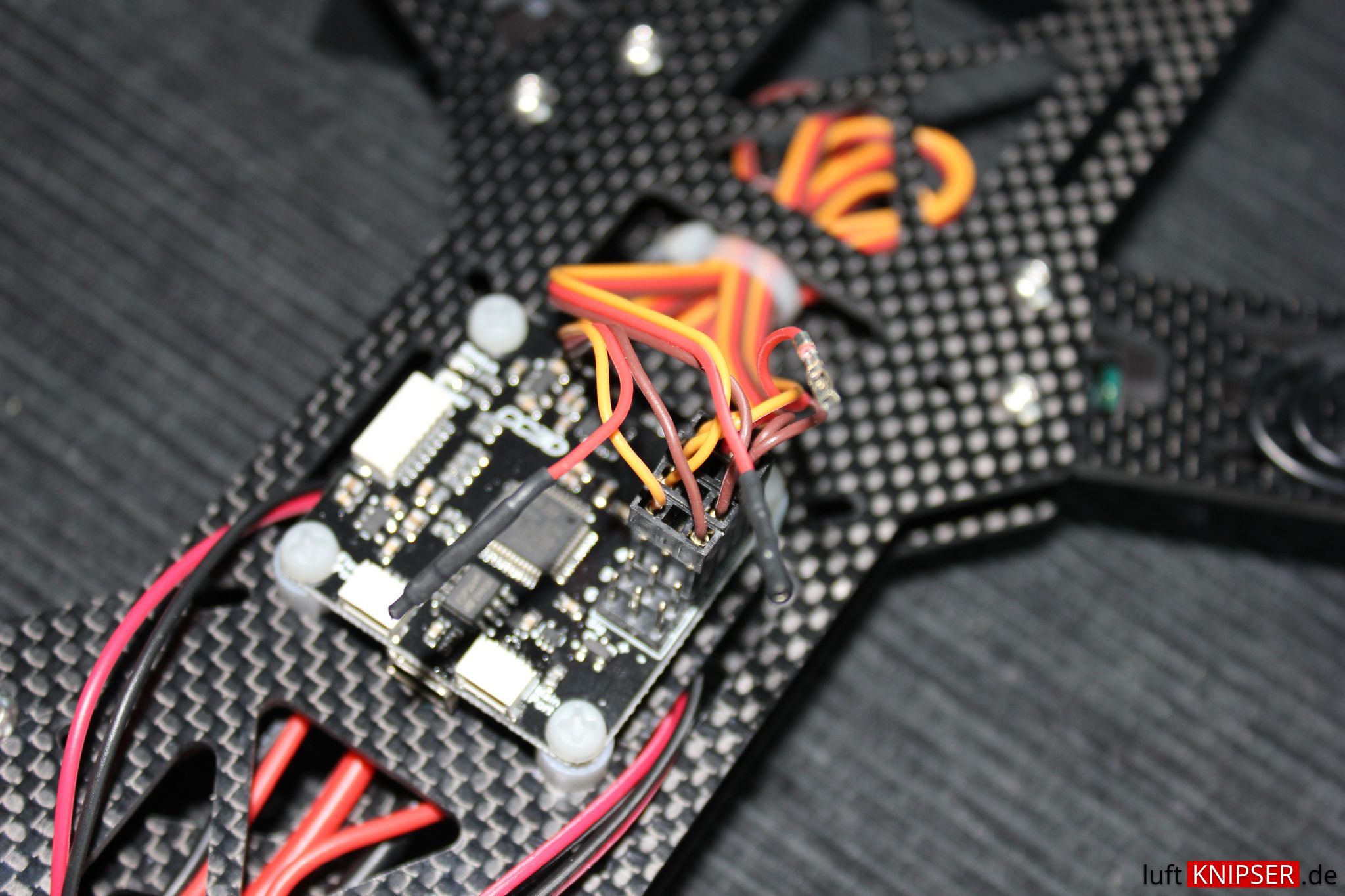
Jetzt geht es an das Auflöten der Kabel an das PDB. Die Stromkabel der ESCs, ein Kabel für die Stromversorgung des FPV-Senders und der Kamera, zwei Kabel für eine spätere LED Beleuchtung und natürlich das LiPo Anschlusskabel. Im Lieferumfang ist ein T-Plug LiPo Anschlusskabel dabei. Dieses habe ich nicht verwendet und dafür ein XT60 LiPo Anschlusskabel aufgelötet.
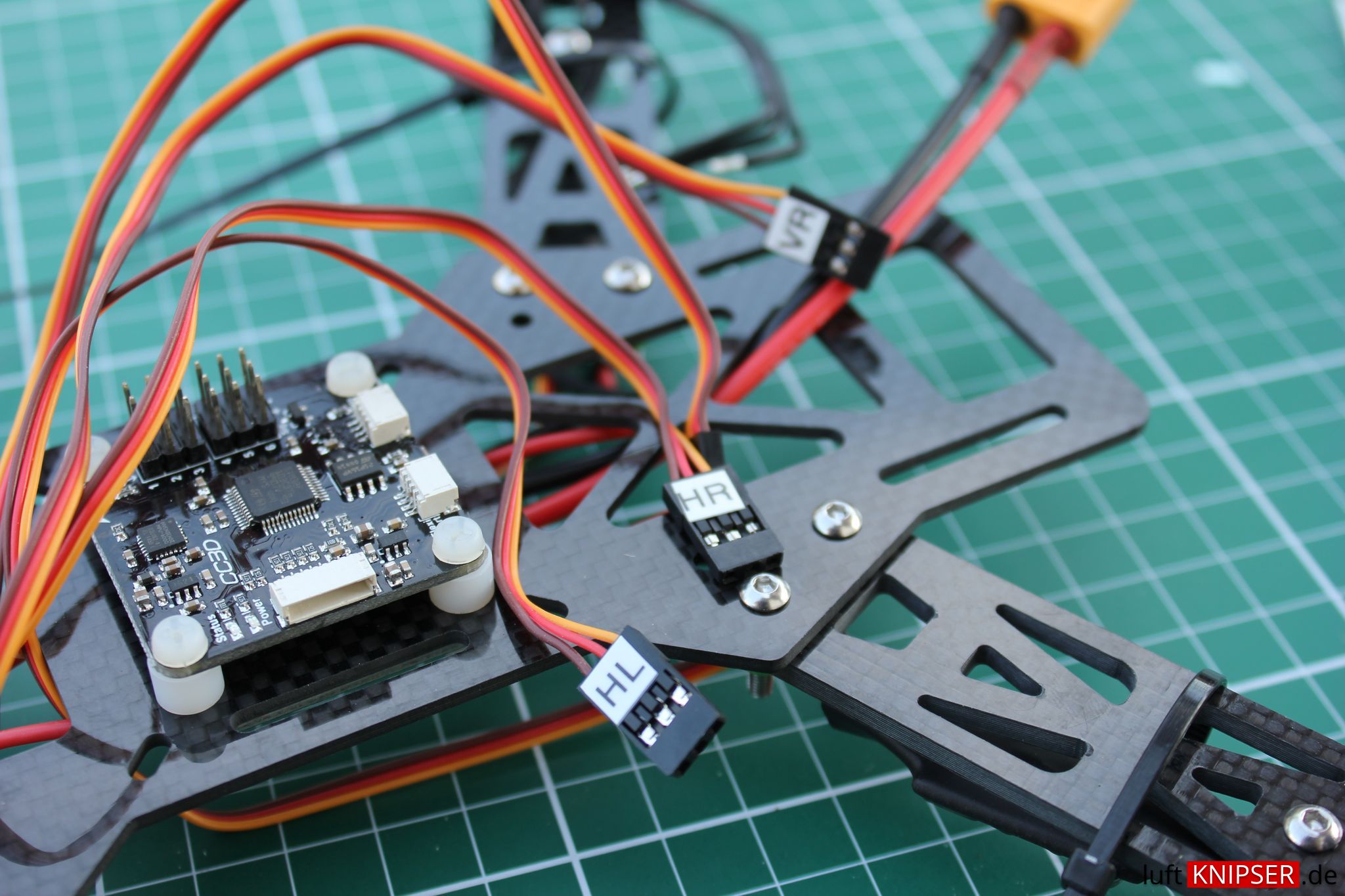
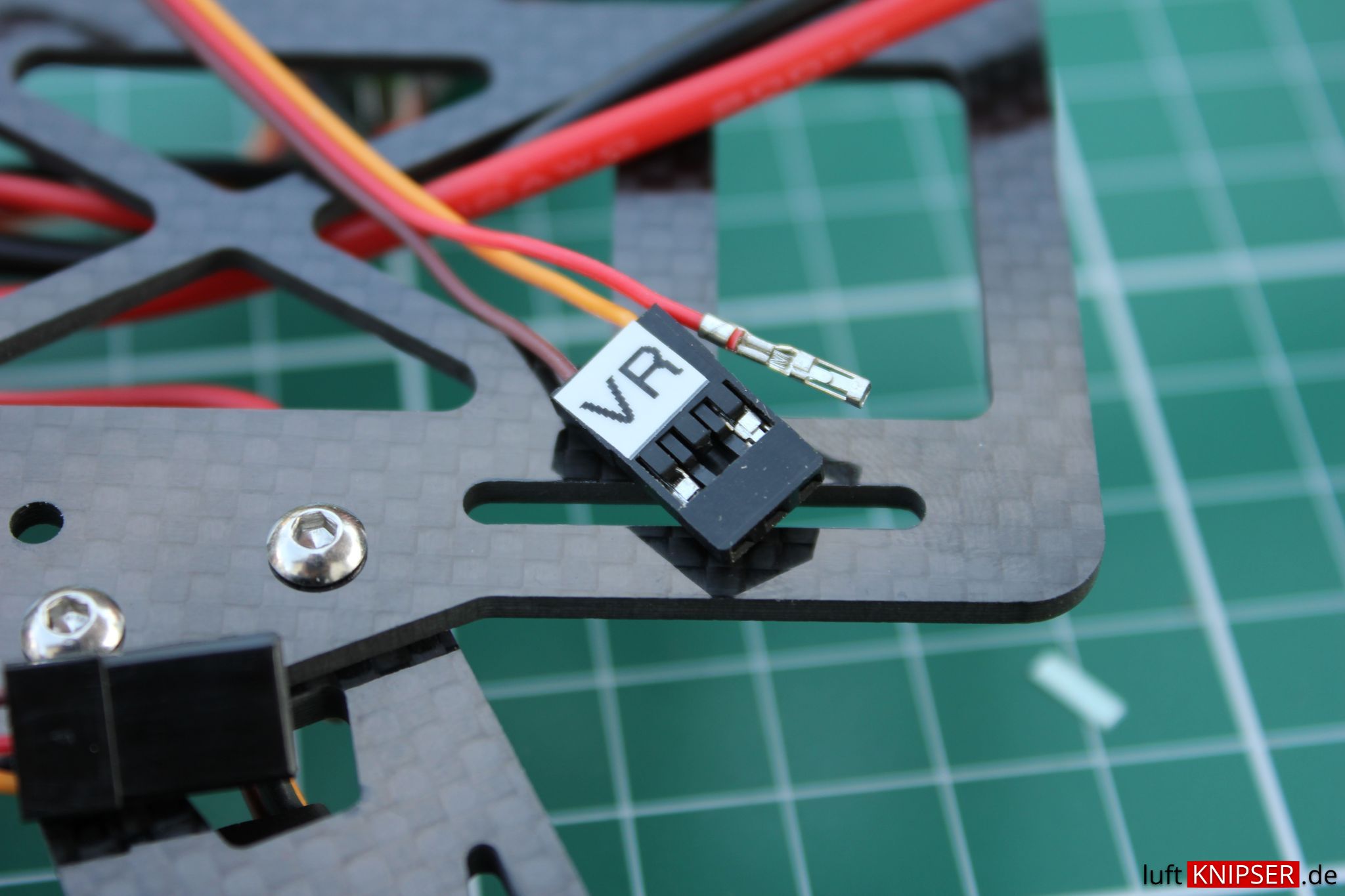
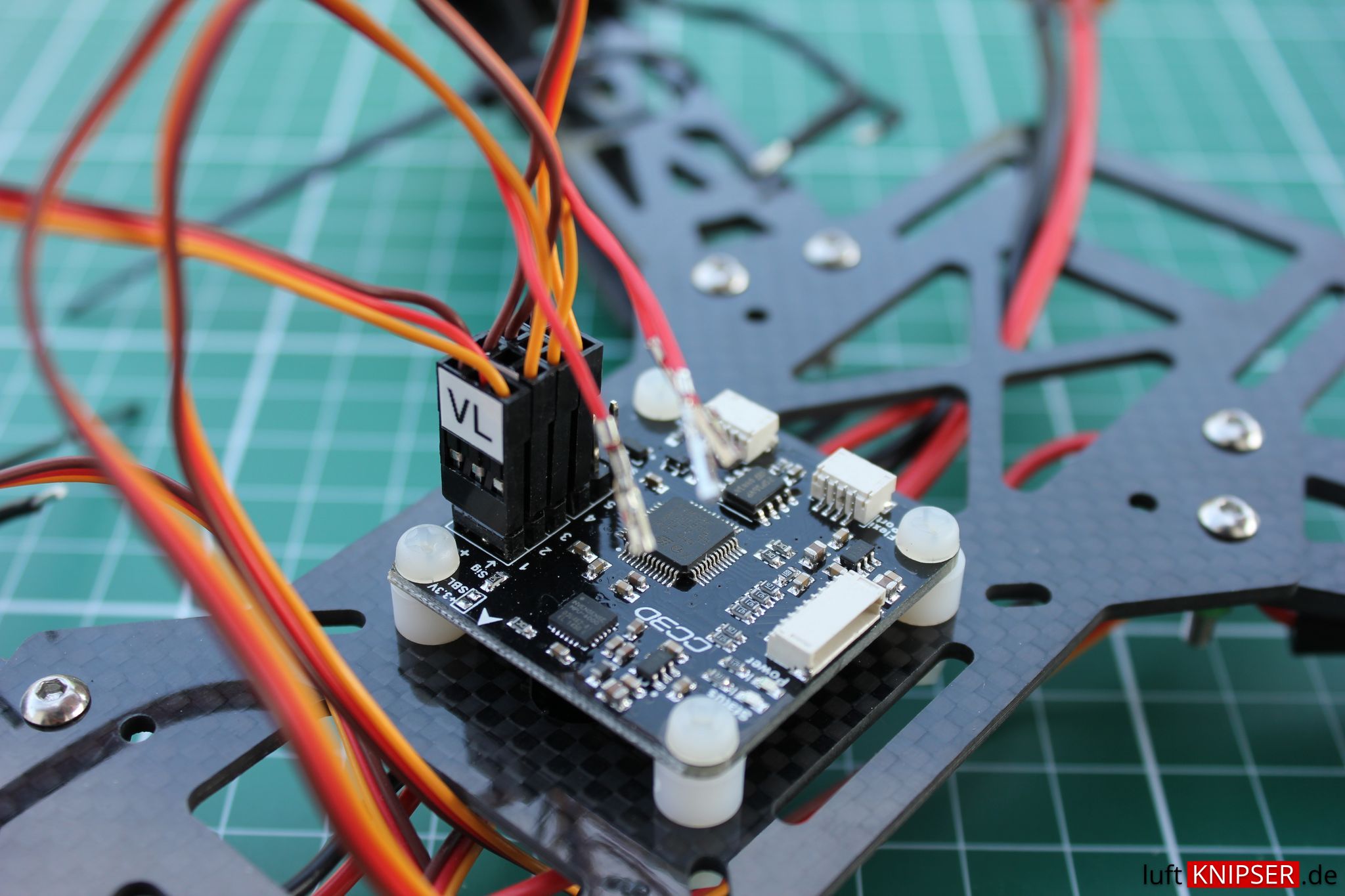
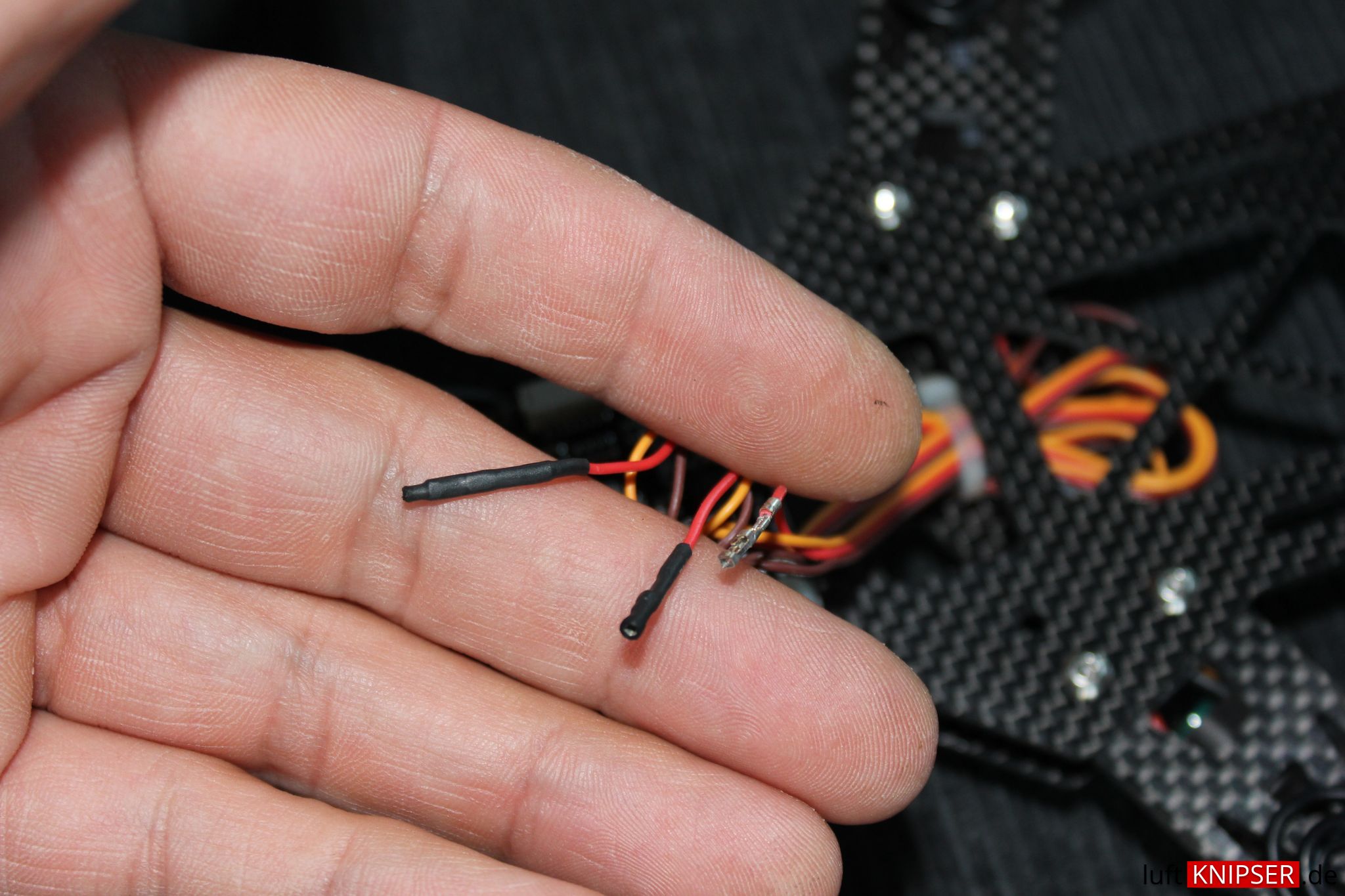
An den ESCs sind 3 polige Stecker mit den Farben ORANGE, ROT und BRAUN. Das orange Kabel ist das Signalkabel, rot ist PLUS und braun ist MINUS. Nur von einem ESC wird das ROTE PLUS Kabel benötigt. Bei den anderen drei ESC-Kabel kann bzw. sollte das Kabel aus dem Stecker entfernt werden. Angeblich kann es zu Störungen kommen wenn alle vier rote Kabel angeschlossen sind, so meine Recherchen aus diversen Foren. Bei dem ESC für den Motor 1 (VL) habe ich das rote Kabel dran gelassen. Die entfernten roten Kabel sind mit Isolierband oder Schrumpfschlauch zu schützen, damit es keinen ungewollten Kurzschluss gibt. Die Stecker der ESCs habe ich mit VL, VR, HR, HL beschriftet damit ich nicht durcheinander komme.
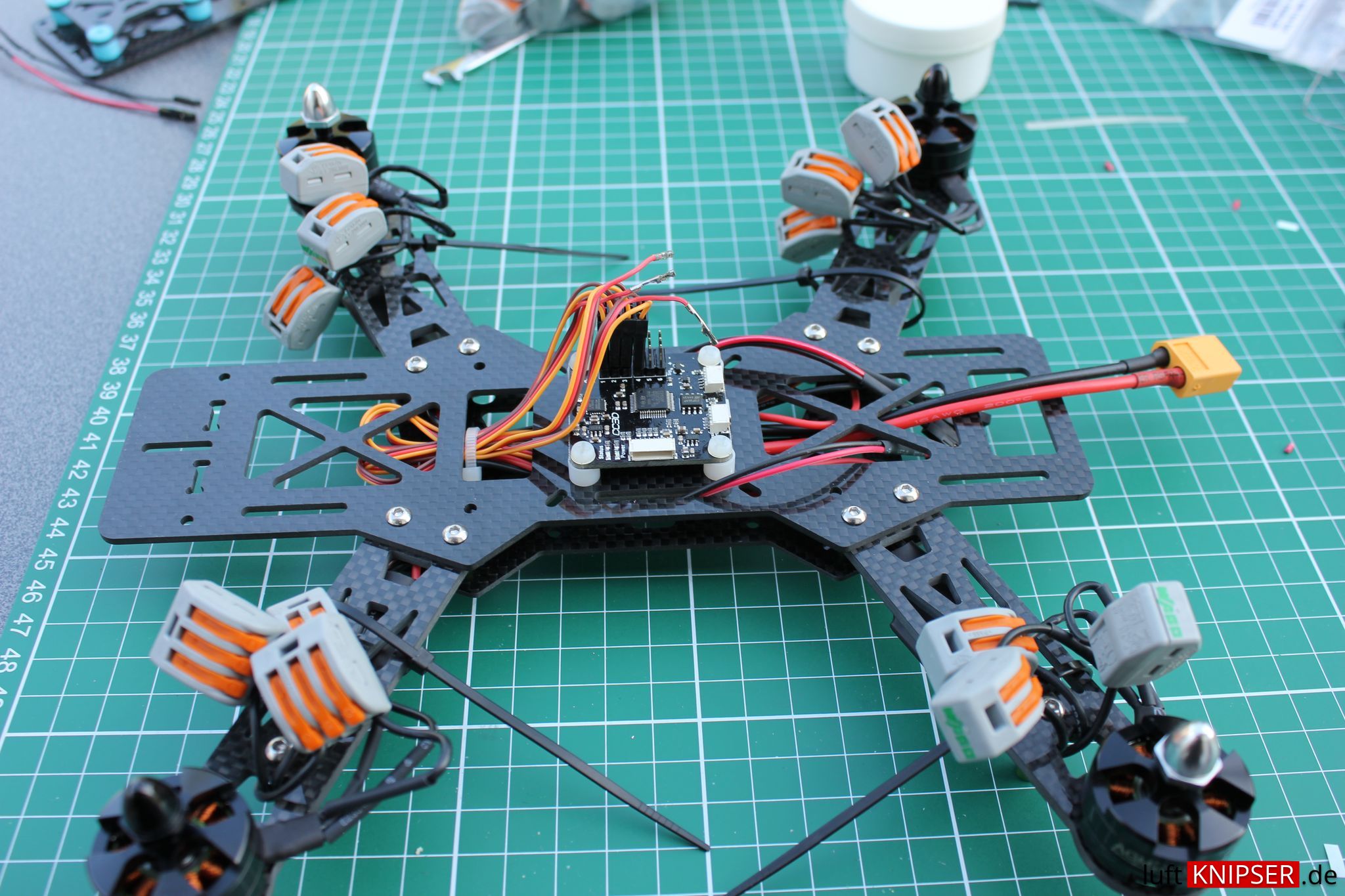
Wenn alles verlötet ist und die Kabel auf der Unterseite der Grundplatte angeordnet sind, kann die Unterplatte mit der Grundplatte verbunden werden. Hierfür werden die selbst sichernden Schrauben verwendet.

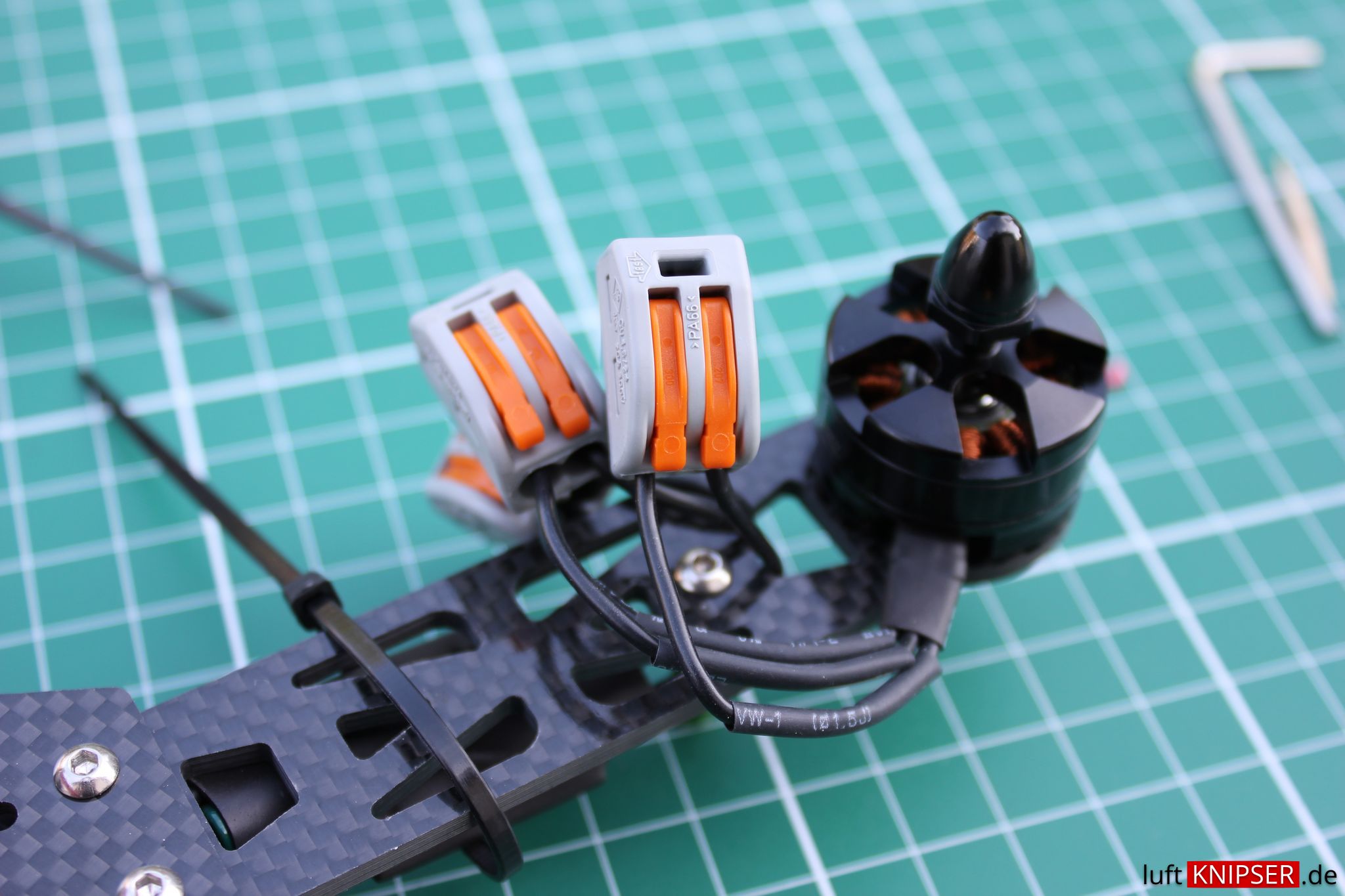
Nun geht es an das Anschließen der Motoren an die ESCs. Wie bereits geschrieben, gibt es an dem MT2204 2300KV Motor drei schwarze Kabel. An dem Simon 12A ESC sind ebenfalls 3 schwarze Kabel. Kein Kabel ist beschriftet. Das ist aber auch nicht nötig. Grundsätzlich sind alle Motoren in der Lage in jede Richtung zu drehen. Die Drehrichtung kann daher erst genau bestimmt werden, wenn man die Konfigurationssoftware OpenPilot Ground Control Station startet und das Setup für die Motoren und ESCs durchführt. (Link zum OpenPilot Wiki)
Man kann nun einfach jedes Kabel vom Motor mit einem ECS Kabel verlöten. Da mir das im Fall einer falschen Aderpaarung zu viel Aufwand mit dem finden der richtigen Paarung ist, habe ich ich entschieden WAGO Klemmverbinder zu benutzen. Wenn dann die richtigen Paarungen gefunden sind, werden die Kabel verlötet. Vorbereitend dazu, kann schon etwas Schrumpfschlauch über die Kabel der Motoren gezogen werden. Dieses wird nach dem Verlöten der Kabel dann über die Lötstelle geschoben und „geschrumpft“.
Als nächstes habe ich mich daran gemacht, den Empfänger an die CC3D Platine anzuschließen. Der CC3D Flight Controller bietet hierfür zwei Anschlussports. Den „Receiver Port“ und den „Main Port“. An den Receiver Port kann im Prinzip jeder 6 Kanal Empfänger angeschlossen werden. An den Main Port kann einen Spektrum Satellit oder ein Futaba S.Bus Empfänger verwenden. Wenn man einen Spektrum oder Futaba S.Bus Empfänger anschließen möchte, benötigt man noch einen StepDown Adapter (Spannungswandler) um die Spannung nach unten zu regeln. Am CC3D liegt nämlich immer die Spannung an, welche über den LiPo eingespeist wird.
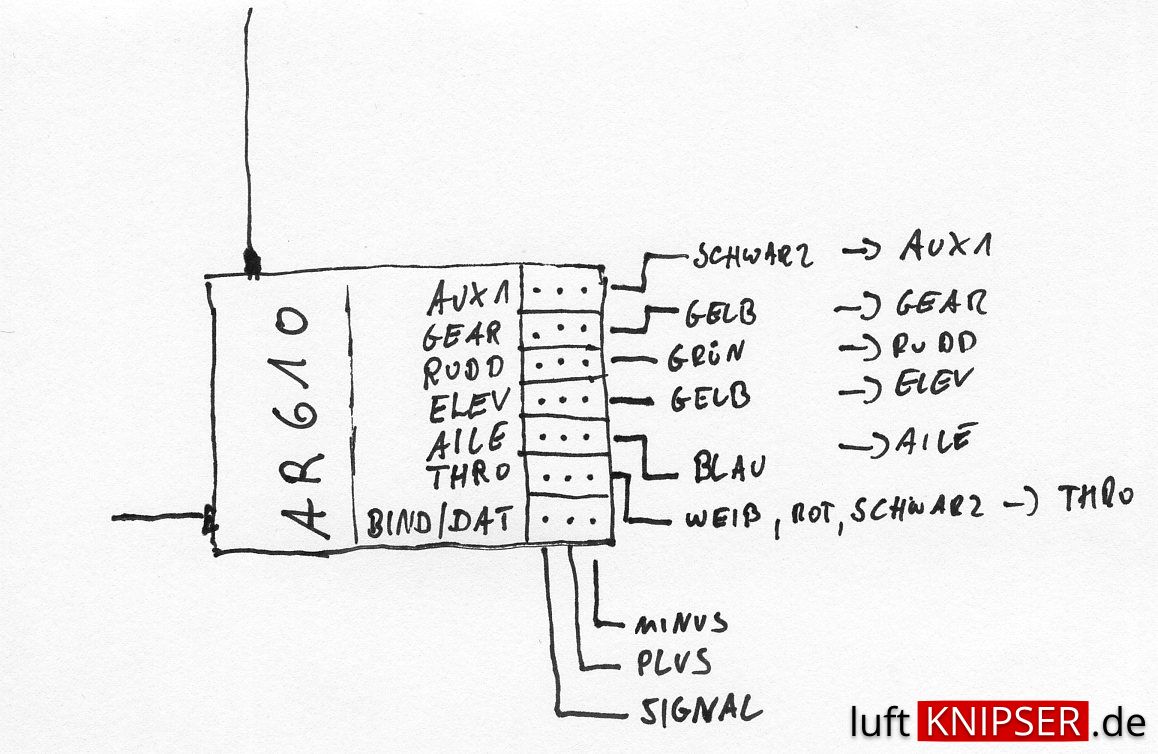
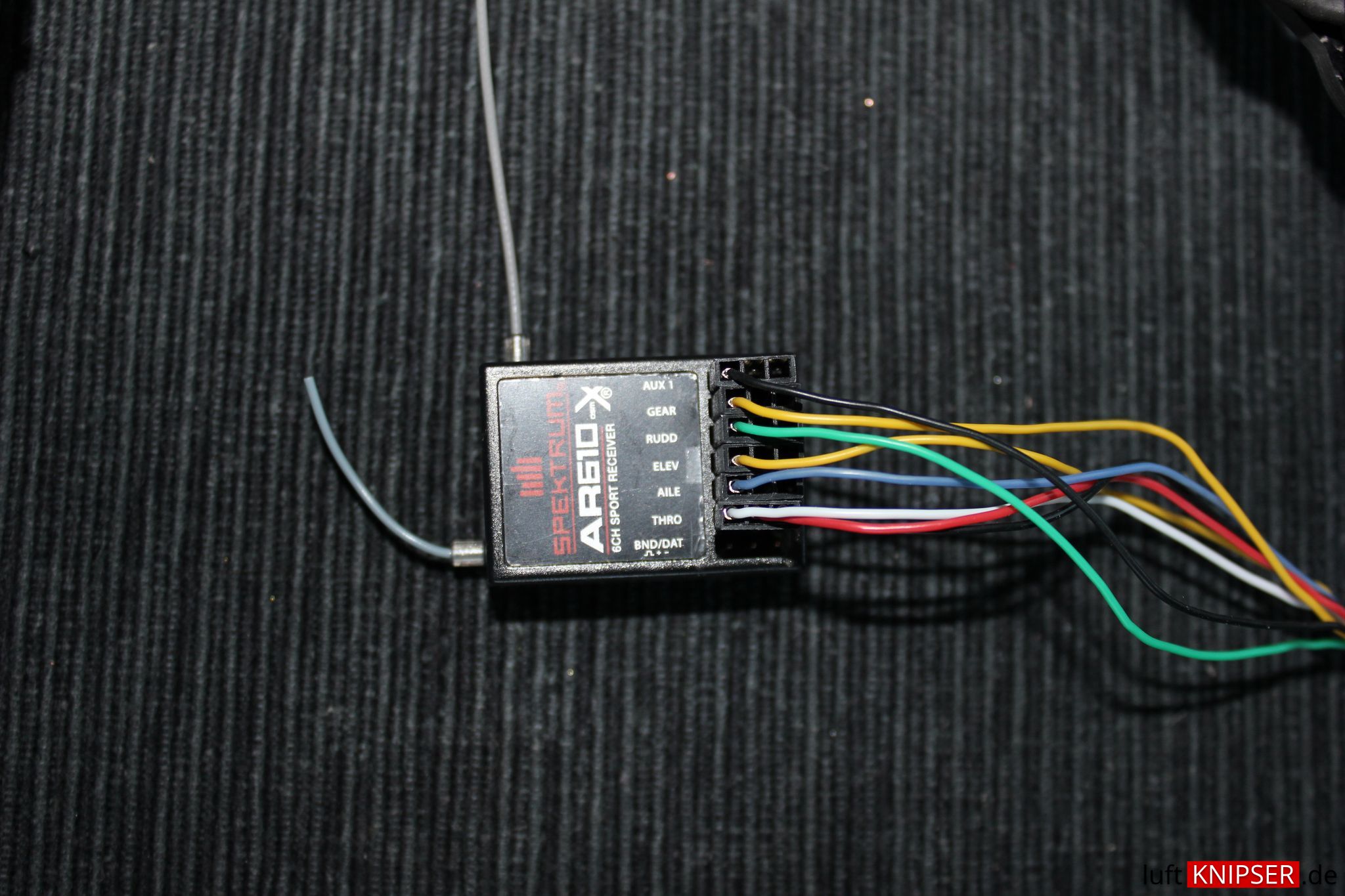
Ich habe mich für einen Spektrum AR610 6 Kanal Full Range Empfänger (Herstellernummer: SPMAR610) entschieden, welcher an den Receiver Port angeschlossen wird. Dem CC3D Flight Controller liegen drei JST-SH Anschlusskabel mit bei. Das breite der Anschlusskabel ist für den Anschluss des AR610 Empfängers an den Receiver Port des CC3D.
Die Anschlussbelegung ist:
- THRO = Weiß, Rot, Schwarz, Weiß muss auf den Signal-Pin
- AILE = Blau
- ELEV = Gelb
- RUDD = Grün
- GEAR = Gelb
- AUX1 = Schwarz
So nun ist es fast geschafft. Um den Nighthawk 250 Rahmen fertig zu stellen, können jetzt die H35 Aluminium Spacer, die FPV-Kamera-Halterung sowie die Top-Platte (Frame Upper Board) samt der Anti Vibration Action Cam Halterung montiert werden.
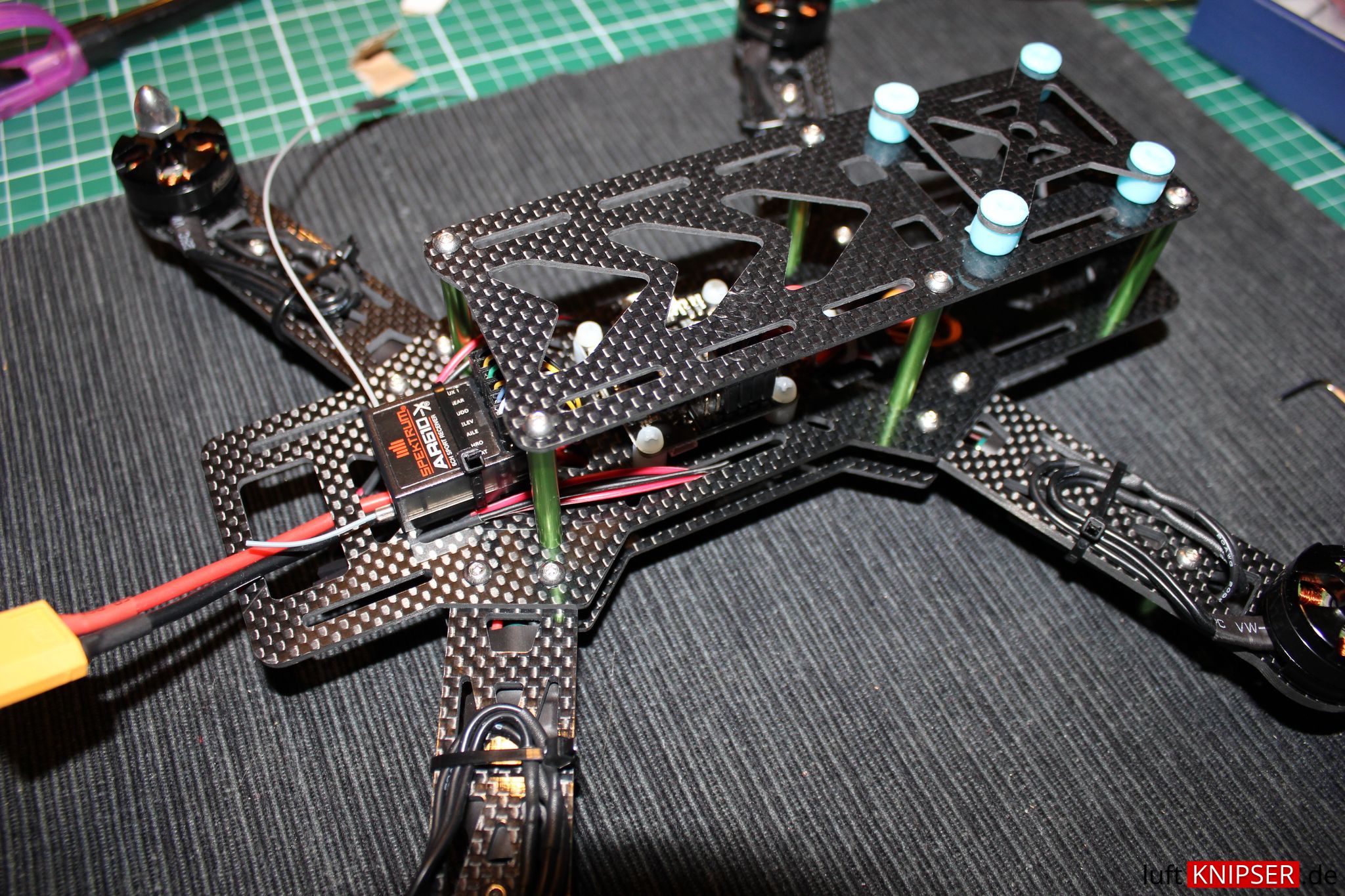
Damit die lange Antenne des AR610 beim Fliegen nicht in die Propeller gerät, habe ich mit einem dickeren Kabelbinder einen Steg hergestellt und ihn auf die Länge der Antenne gekürzt. Die Antenne habe ich dann entlang des Kabelbinders geführt und mit einem Stück Schrumpfschlauch überzogen. Den Schrumpfschlauch habe ich nicht „geschrumpft“. Das Klettband für die Fixierung des LiPos habe ich auch eingeführt.


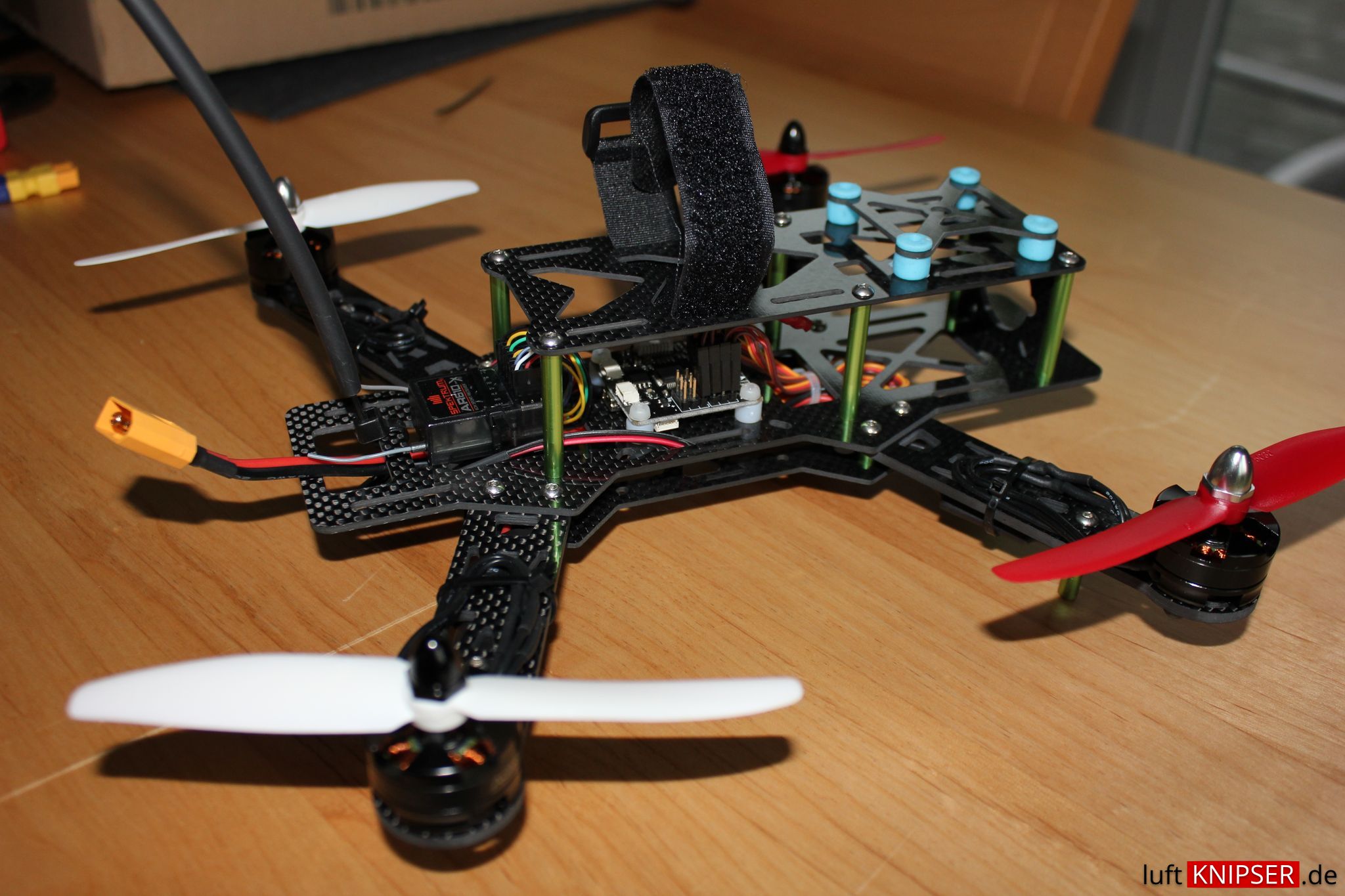
Wichtig! Bevor es an die Konfiguration des Kopter mit der OpenPilot Software geht, UNBEDINGT die Propeller demontieren!
Kapitelübersicht:
- Nighthawk 250 FPV Racer – Lieferumfang
- Nighthawk 250 FPV Racer – CC3D einrichten (OpenPilot)
- Nighthawk 250 FPV Racer – FPV Komponenten
- Nighthawk 250 FPV Racer – Erstfug (noch nicht verfügbar)
25 Antworten zu “Nighthawk 250 FPV Racer – Zusammenbau”
[…] Nighthawk 250 FPV Racer – Zusammenbau […]
Hallo, echt eine super Anleitung, ein großes Lob dafür! Ich finde es ist die beste zur Zeit im Internet die ich gefunden habe! Wann kann man mit den Rest rechnen? Die Einrichtung des CC3D und der FPV Anleitung?
Ich bin wirklich sehr gespannt darauf…da ich mir nächste Woche mir auch einen Racer basteln möchte.
Grüße Matthias
Wow, besten Dank für das Feedback. Denke den CC3D Beitrag kann ich in ein paar Tagen zur Verfügung stellen. Dann folgt alsbald FPV Part.
[…] Nighthawk 250 FPV Racer – Zusammenbau […]
[…] Nighthawk 250 FPV Racer – Zusammenbau […]
Hallo Matthias, wir fanden die Anleitung auch wirklich prima und haben den Nighthawk identisch aufgebaut. Bei unserer Lieferung haben sich die Farben der CC3D-Kabel etwas geändert, aber dank der Skizze war das kein Problem. Auch hatten die Kabel der Motoren (oder waren es die der ESCs?) Hülsen. Da wir nicht wussten, wie diese mit den anderen Kabel verbunden werden, haben wir die Hülsen entfernt und die Kabel verlötet.
Hier ist ebenfalls noch eine weitere Anleitung:
http://www.drohnen-forum.de/index.php/Thread/11773-FPV-Racer-Nighthawk-QAV-250-EMax-Anleitung-Zusammenbau/
Bei meinen kabeln waren sogar 2 farben doppelt, hab sie einfach der reihe nach angeschlossen und das passte dann auch
Bei mir bekommt der Empfänger keinen Strom bzw. beim GCS transmitter Setup erkennt er keine Inputs. (GCS zeigt auch bei Input rot an).
Kabel sind am Empfänger angesteckt wie beschrieben.
Leuchtet/Blinkt die LED am Empfänger? Ist der Empfänger mit dem Sender bereits gebunden?
Guten Abend.
Habe das selbe Problem der Empfänger blinkt nicht und ich kann ihn auch nicht über die Funke binden.
Habe die Spektrum DX6 mit dem AR610 x
Hätten Sie ein Tipp woran das Lirgen könnte
Der Empfänger bekommt aber Strom, oder? Der Bind-Plug ist auf den AR610 aufzustecken bevor er Strom bekommt.
Unglaublich tolle Anleitung die mir jetzt helfen wird meinen Copter, der gestern gekommen ist, in die Luft zu bekommen, denn da fehlten leider jegliche Anleitung über die Elektronik. Danke dafür.
Danke für´s Feedback Michael. Wünsche gutes Gelingen beim Aufbau und lass hören wie der Erstflug war.
heute hatte ich erstflug, dank dir. jetzt muß ich das nur noch mit dem Flugzustand hin bekommen. Nochmal 1000 Dank
So, ich habe fertig, jetzt funktioniert auch mein 3 Stufen Schalter.
https://plus.google.com/u/0/photos/101633328988448732659/albums/6288554846779211505
Ja prima, gratuliere. Tolles Design der Haube 🙂
so, jetzt hab ich auch einen qav 250, was mir fehlt ist eine anleitung über die umfangreichen einstellungen des cc3d. youtube geht ja leider nur auf die grundeinstellungen ein. gibt es irrgendwo soetwas? gruß michael
https://plus.google.com/u/0/101633328988448732659/posts/bdPT8vQZSJb?pid=6298023536894302034&oid=101633328988448732659
oh, jetzt weis ich wenigstens warum ich zu open pilot nix mehr finde. das projekt ist gestorben und geht mit http://www.librepilot.org/ weiter.
Ja, so ist es.
Am CC3D stellt man nichts ein. Sicherlich meinst du die Software oder? Das wäre dann von Haus aus Openpilot, bzw. das Nachfolgeprojekt Librepilot oder du flashed die Firmware auf Cleanfligt oder Betaflight um.
[…] Matthias bei Nighthawk 250 FPV Racer – Zusammenbau […]
durch eine ausführliche beschreibung bei Amazon haben mich viele menschen nach der anleitung gefragt die mir so geholfen hat. Danke nochmal für deine arbeit die vielen Menschen geholfen hat. mittlerweile (nach langer zeit und viele youtube videos) bin ich mit dem cc3d so weit das ich flippen und rollen kann so wie ich es möchte und jetzt hab ich richtig spass mit meinen racern
Vielen Dank für dein Feedback Michael. Das freut mich sehr. Weiterhin viel Spaß mit deinen Racern.
Im Mai 2016 hat mir diese Anleitung sehr geholfen, was ich in einer Rezension bei Amazon geschrieben habe, Seit dieser zeit haben mich xx Menschen angeschrieben und haben um den link gebeten. An dieser Stelle sag ich noch mal danke und ich hoffe das diese Anleitung niemals gelöscht wird.
da viele Menschen diese Anleitung nutzen noch eine kleine Anmerkung. Mittlerweile nutze ich keine spektrum Empfänger mehr sondern den „Spektrum Quad Race Serial Receiver w/Diversity“ der kleiner und leichter ist und nur ein 3 pooliges Kabel hat. Die benötigten 3.3V kommen vom cc3d Board und eine Anleitung zum Anschluß findet man bei youtube.