Der Blade 350 QX sendet von Haus aus keine Telemetriedaten an eine Bodenstation oder vergleichbare Systeme. Obwohl er im Prinzip alle relavanten Daten vorhalten könnten. Mit GPS, Barometer, Kompass und Volt-Sensor ist alles vorhanden, doch es fehlt ein Sender um die Daten an einem Empfänger zu übermitteln. Auch ist es von Horizon Hobby nicht angedacht, solche Daten vom Blade 350 QX über eine Schnittstelle abzugreifen.
Flugdaten des Kopters aufzeichnen
Da mich die Flugdaten interessieren, habe ich am Blade 350 QX vor geraumer Zeit bereits den Flytrex Core v2 installiert. Dieser kann das GPS Signal über ein Ypsilon-Kabel vom Kopter abgreifen und schreibt die Flugdaten wie Höhe, Geschwindigkeit, Flugdauer, Flugroute und so weiter in ein Logbuch auf eine SD-Karte. Das Logbuch kann man nach dem Flug am Computer auswerten und auch grafisch betrachten. Das ist schon alles richtig gut gemacht, doch wer eine Übermittlung der Flugdaten in Echtzeit haben möchte, muss sich was anderes einfallen lassen.
Flugdaten in Echtzeit an eine Bodenstation übermitteln
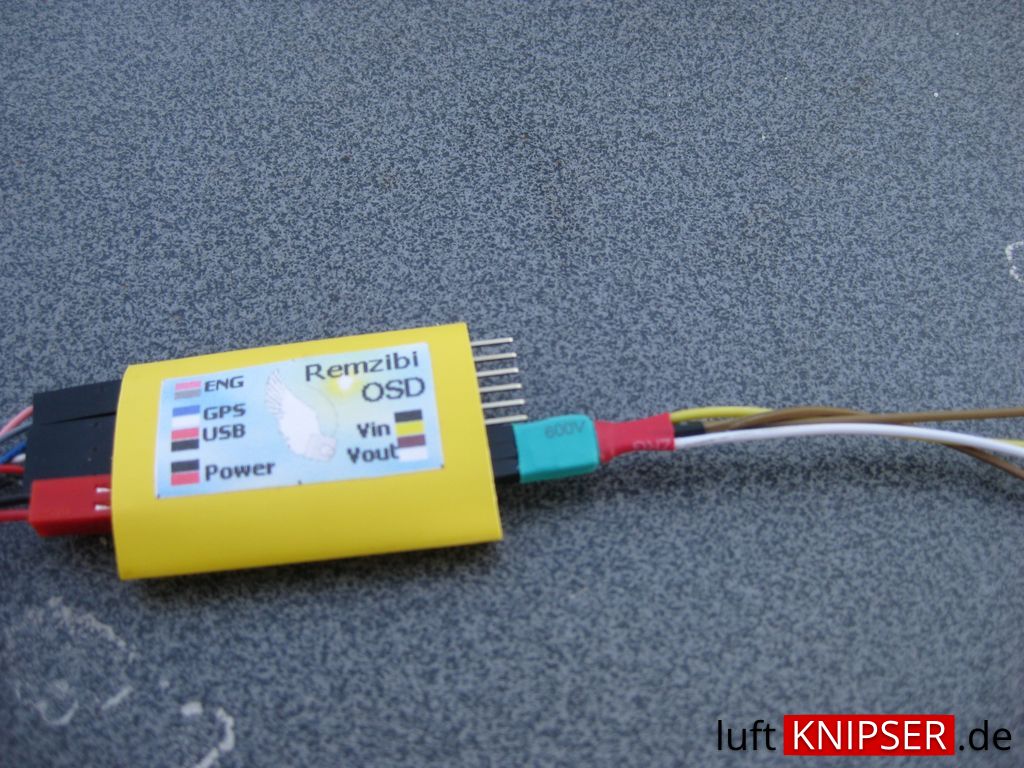
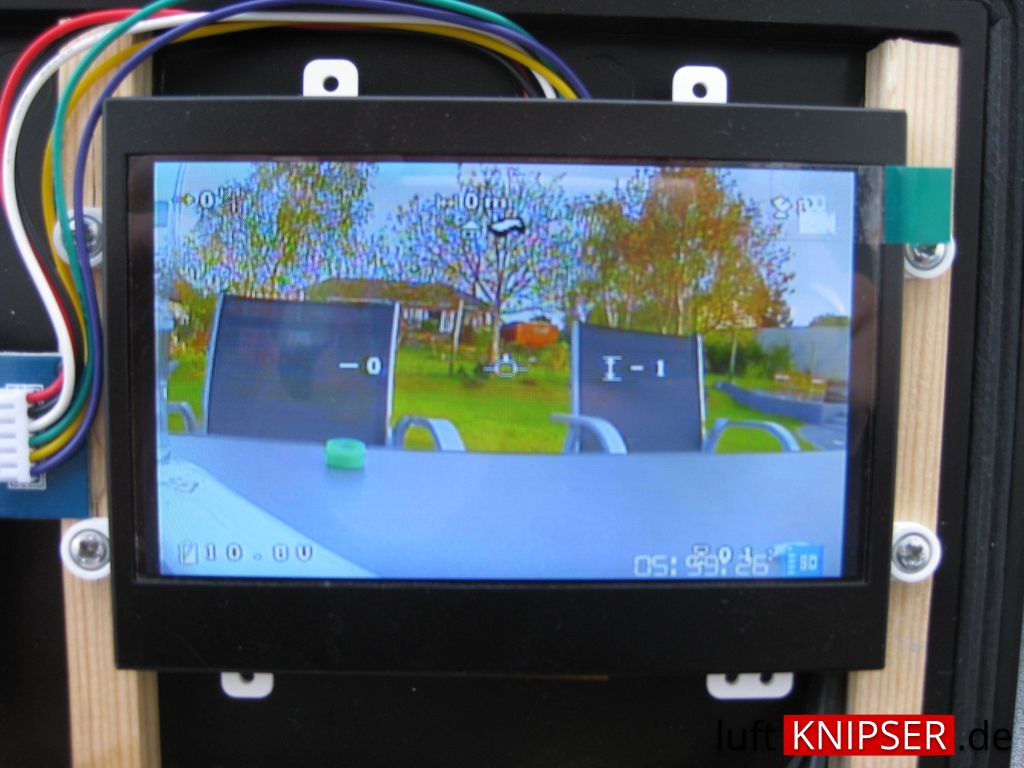
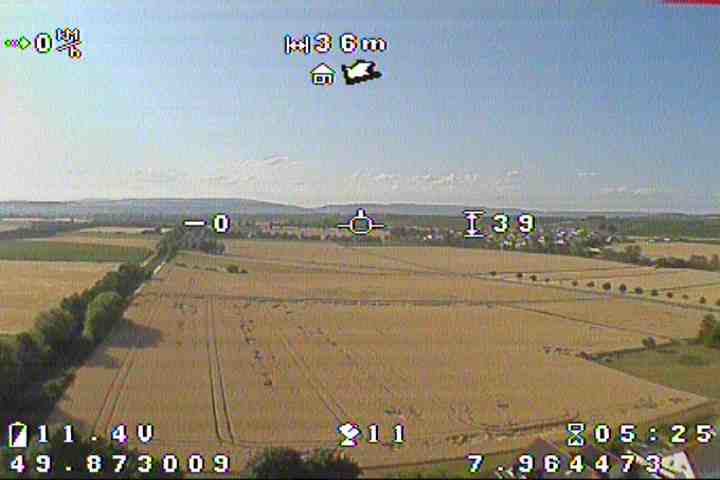
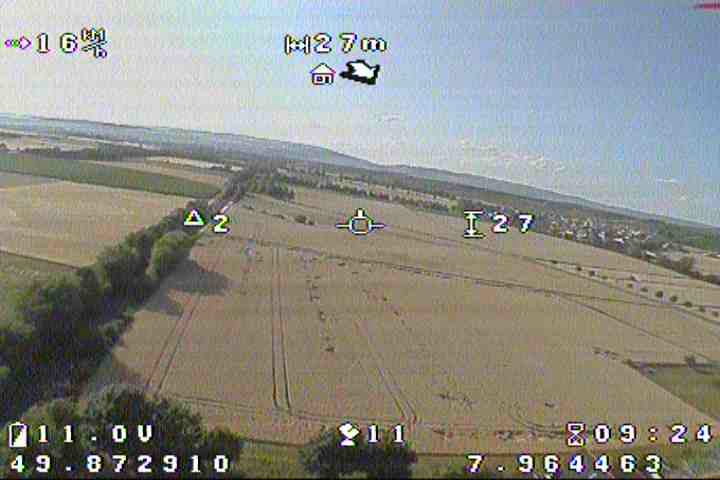
Mein Lösungsansatz um die GPS Position, die Fluggeschwindigkeit, die Höhe, die Entferung vom Startpunkt und die Lipo Spannung in Echtzeit zu übermitteln, ist das remzibiOSD System. Zusätlich wird noch ein Video Transmitter benötigt, um die vom remzibiOSD gesammelten und bereitgestellen On Screen Informationen auf eine Videobrille oder Bodenstation zu übertragen. Der Entwickler des remzibiOSD stellt auf einer Webseite eine ausführliche Dokumentation in englischer Sprache zur Verfügung, daher gehe ich nicht im Detail auf die Konfigurations- und Abschlussmöglichkeiten ein.
remzibiOSD Installation am Blade 350 QX
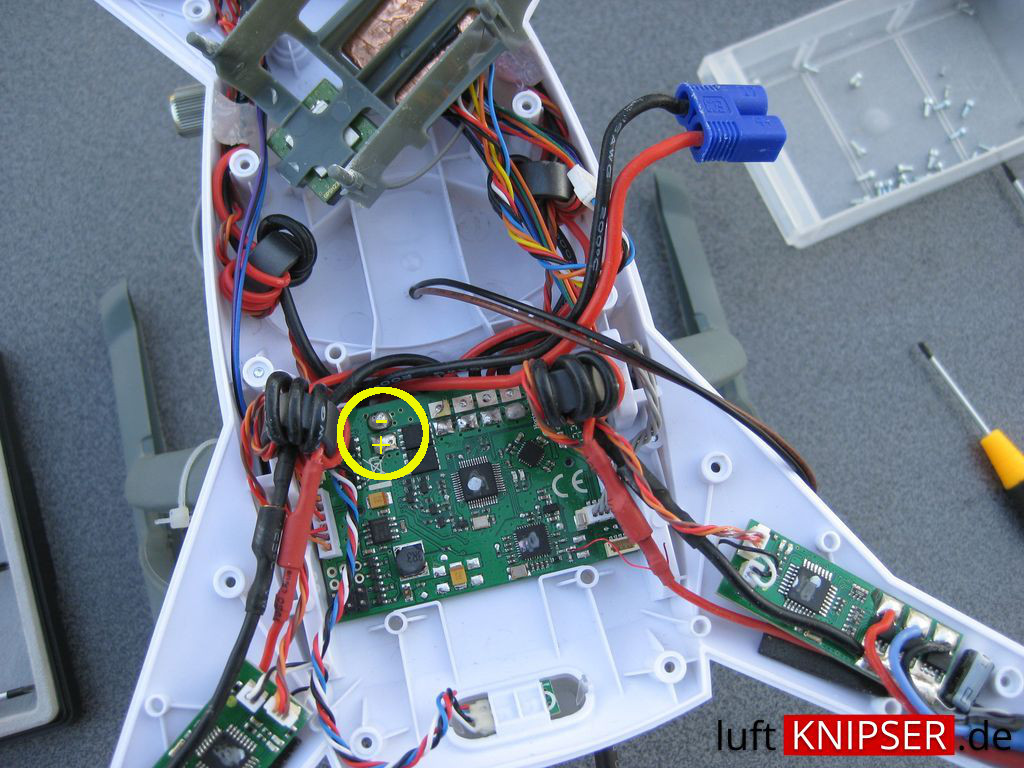
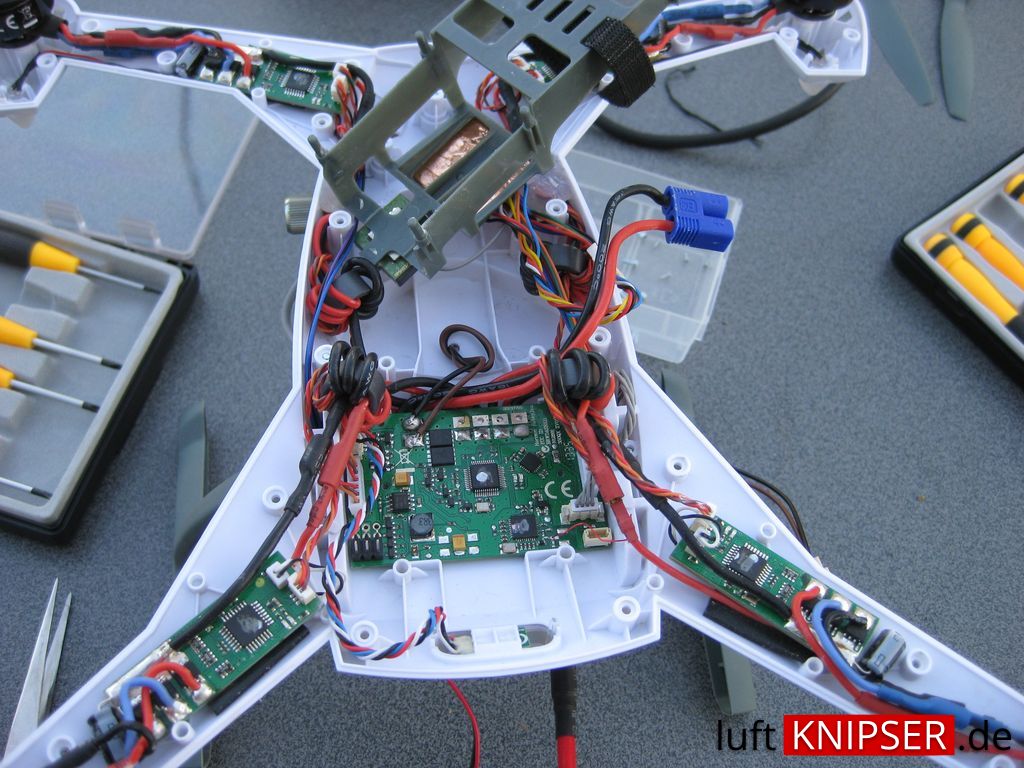
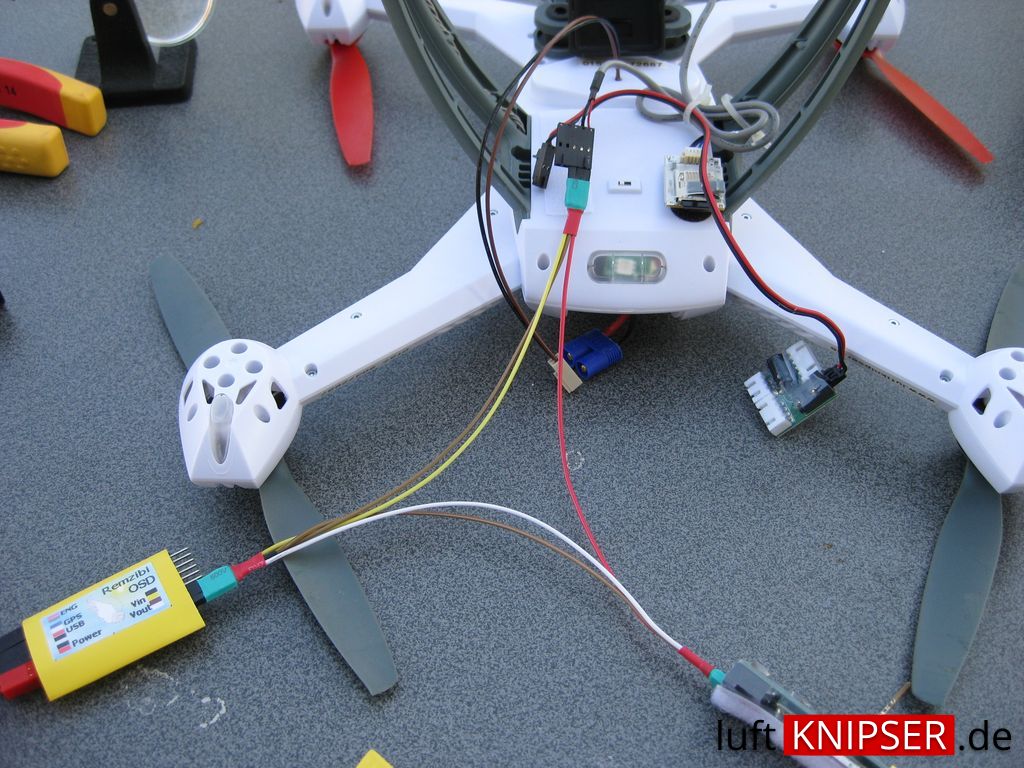
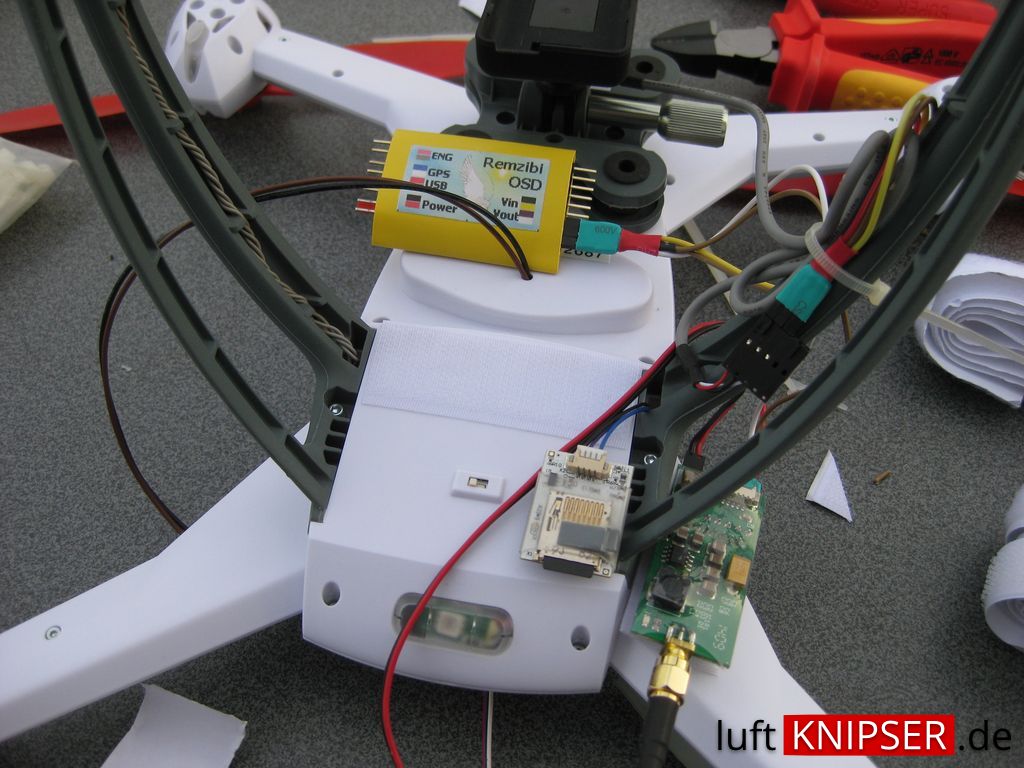
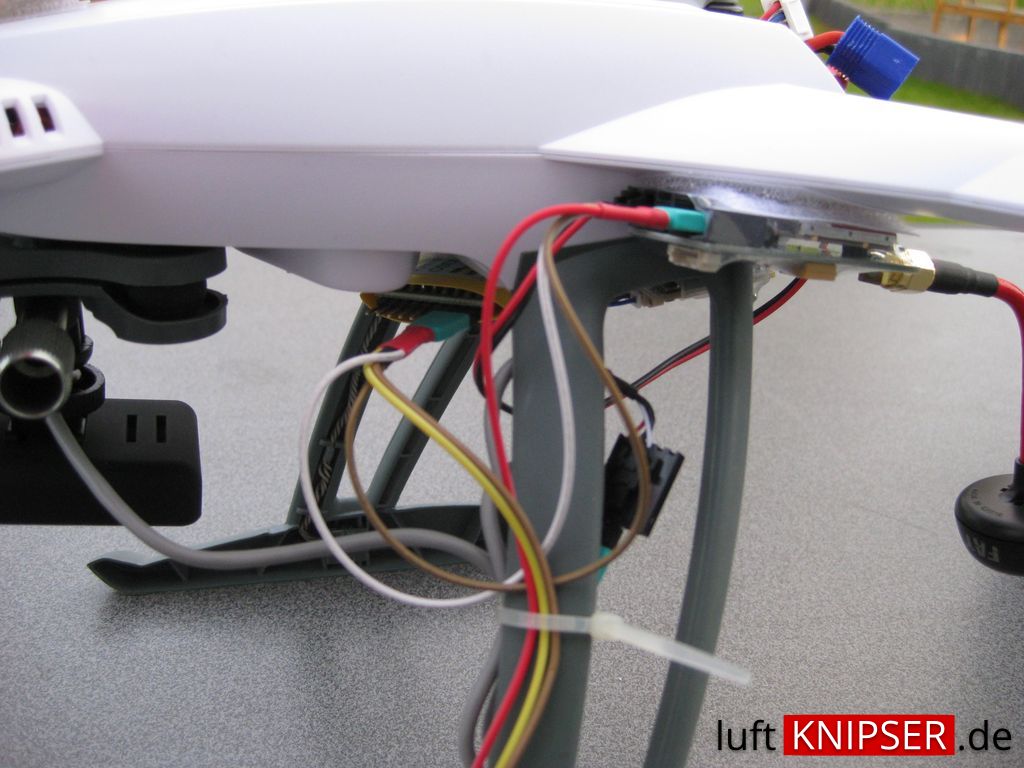
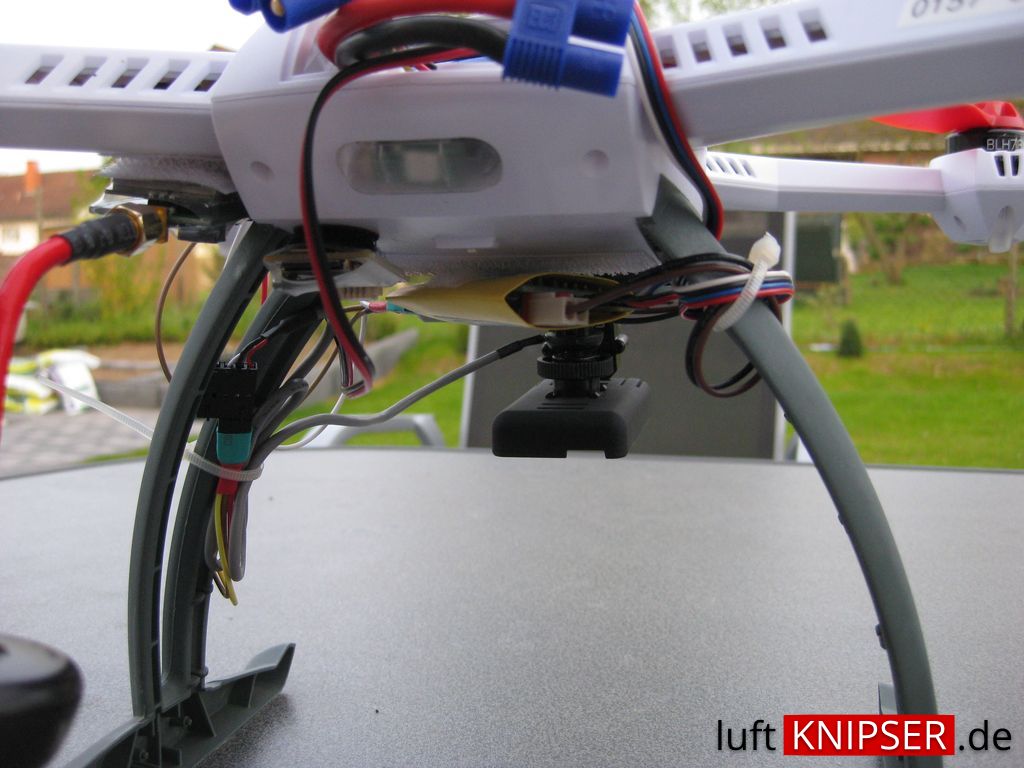
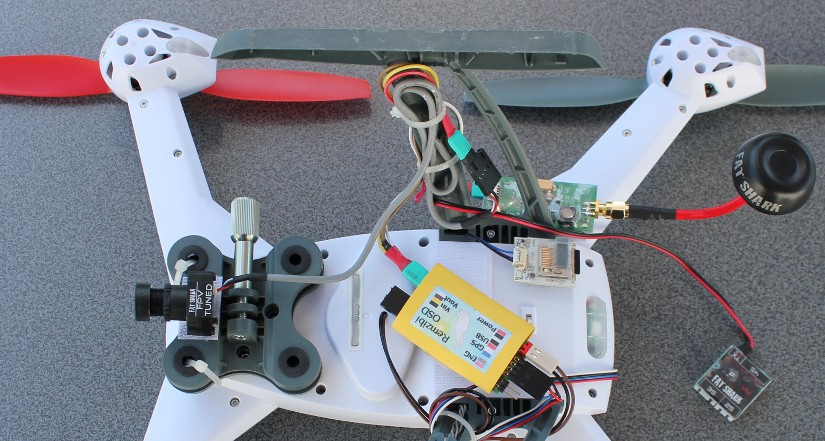
Als Stromversorgung benötigt das remzibiOSD 7,5V bis 12,6V. Um mir einen Adapter zwischen dem Blade 350QX und dem LiPo zu sparen, greife ich die 12V direkt vom Mainboard des Blade ab. Das Kabel führe ich durch ein kleines Loch im Frame nach außen.
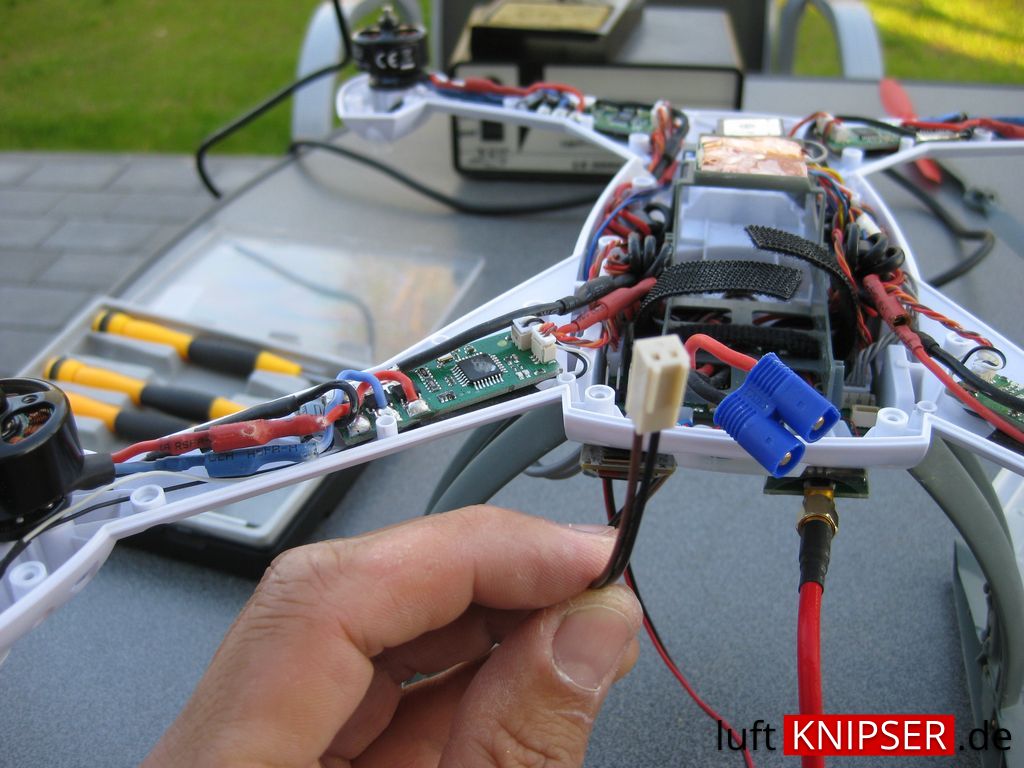
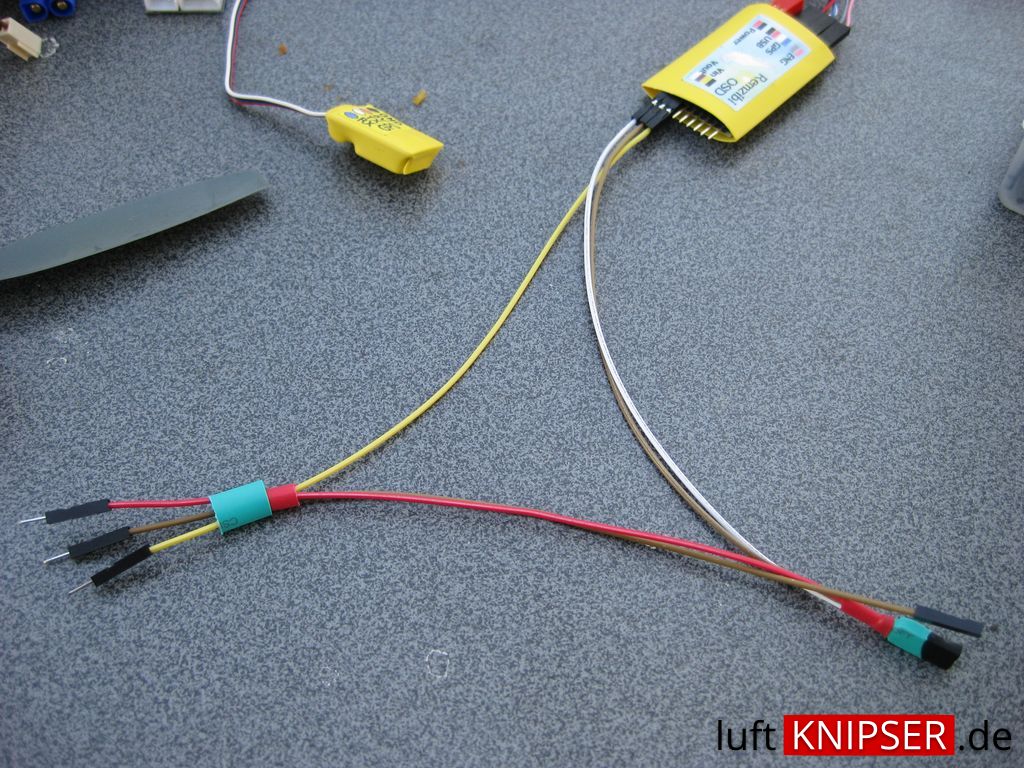
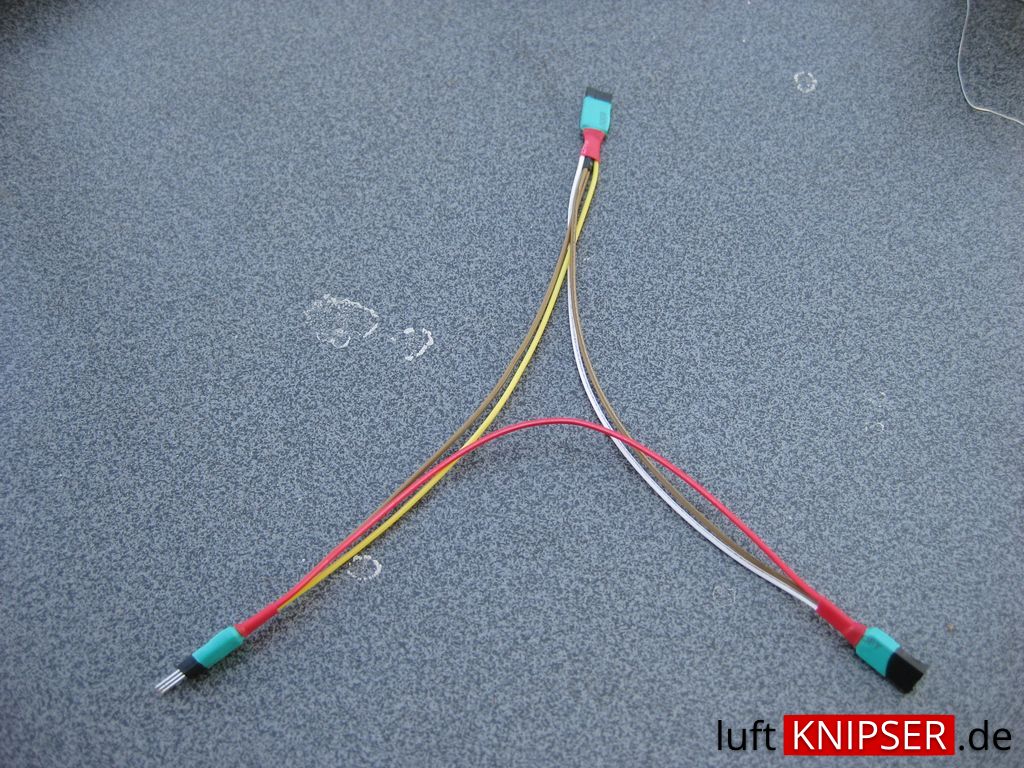
Um das remzibiOSD mit dem Fatshark FPV Sender und der FPV-Kamera zu verbinden, musste ich mir die notwendigen Kabelverbindungen selbst bauen. Nach etwas Grübeln und Löten waren die Verbindungskabel dann in kurzer Zeit hergestellt.
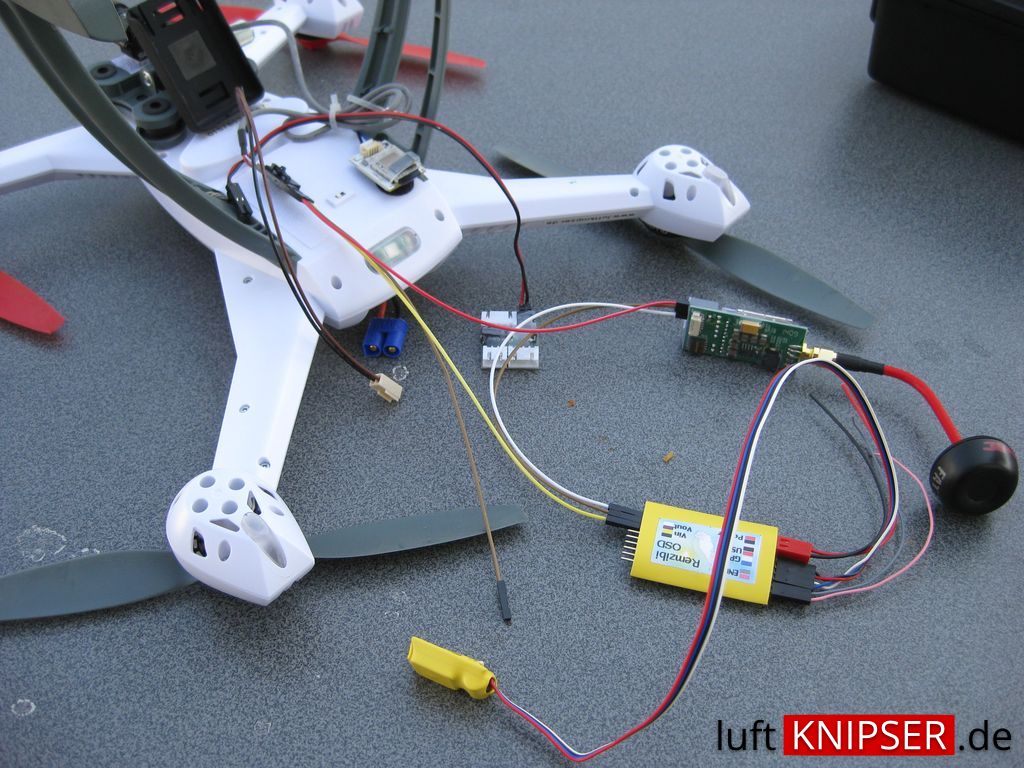
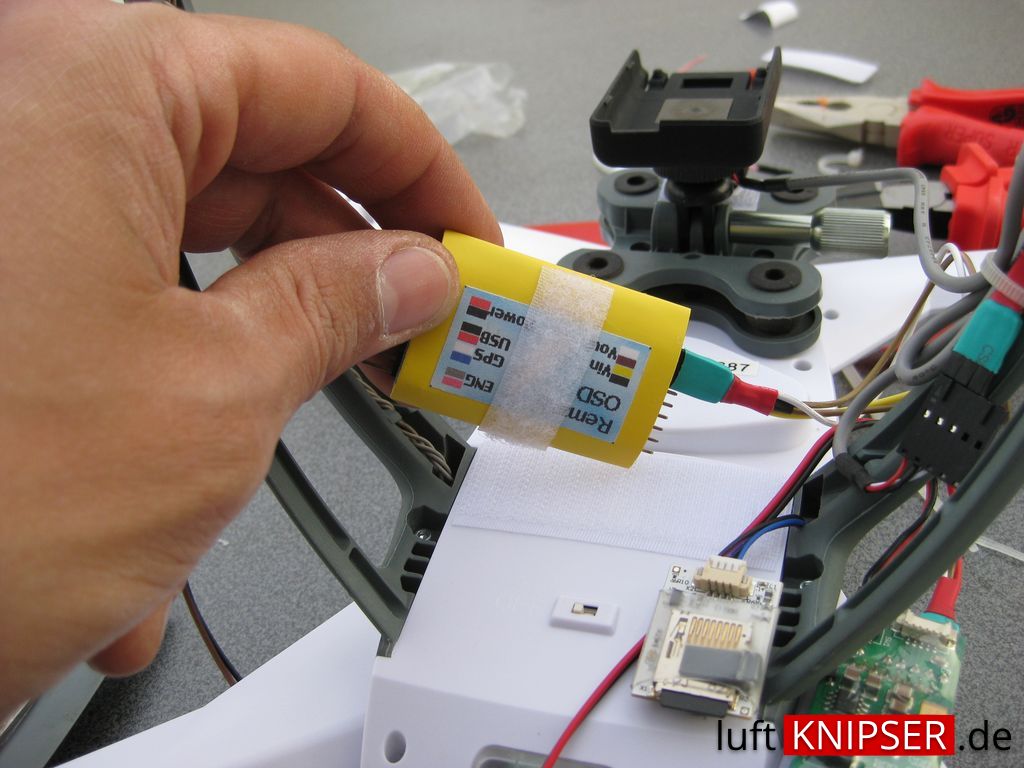
Mit einem Klettband habe ich das remzibiOSD auf der Unterseite des Kopters angebracht. Die GPS-Antenne ist ebenfalls mit Klettband auf der Oberseite des Blade 350QX fixiert. Die Kabel habe ich mit Kabelbinder an den Landebeinen befestigt.